
Willkommen zum Projektseminar Robotik und Computational Intelligence (V1+P3)

Jedes Jahr im Sommersemester bietet das ris euch das Projektseminar Robotik und Computational Intelligence an.
Es ist eine einzigartige Möglichkeit, hardwarenah an einem mobilen Roboter eurer ingeneurstechnische Kreativität freien Lauf zu lassen. Im Rahmen der Projektarbeit bearbeitet Ihr in Teams von 3-4 Studierenden eine Aufgabe aus dem Bereich der mobilen Robotik.

Jede Gruppe erhält einen mobilen Roboter vom Typ „MentorPi“, welcher sich autonom in einem Labyrinth zurecht finden muss.
Entscheidet selbst, welche Lösungsansätze euer Roboter verwendet, um die gestellte Aufgabe zu lösen. Ihr habt dabei komplett freie Hand beim Planen, Umsetzen und Lösen der Aufgaben.
Arbeitet zusammen mit eurem Team und setzt euch im Abschlusswettbewerb gegen die anderen Gruppen durch. Am Ende zählt: Welches Team entwickelt die besten Lösungsstrategien für ihren Roboter?
Thema Projektseminar Robotik SoSe25

Roboter werden häufig dort eingesetzt, wo es dem Menschen zu unangenehm (dirty), zu gefährlich (dangerous) oder zu eintönig (dumb) ist. Motivation in diesem Semester sind sogenannte Search-and-Rescue-Aufgaben, bei denen mobile Roboter dazu eingesetzt werden, Opfer von Naturkatastrophen zu finden und/oder zu bergen.
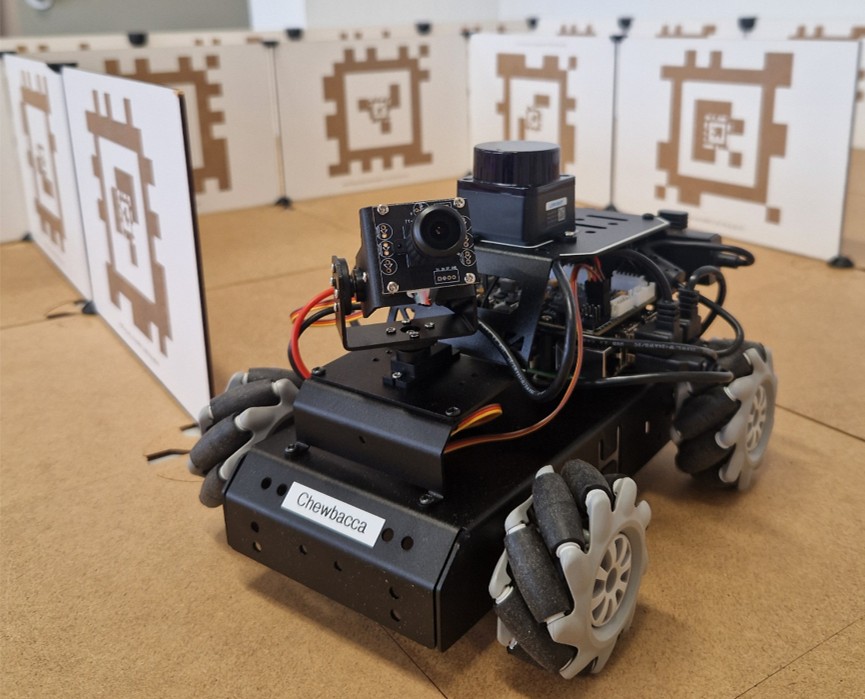
Jede Gruppe erhält einen eigenen Roboter. Im Projektseminar soll ein autonomer Roboter realisiert werden, der eigenständig ein Labyrinth erkunden und anschließend verlassen kann, wobei der Roboter zur Orientierung die Kamera und weitere Sensoren nutzt. Zentrale Anforderungen bei dieser Aufgabe sind die Lokalisierung und Kartografierung innerhalb eines unbekannten Labyrinths. Die Lösung des Labyrinths wird nach ihrer Effizienz und Geschwindigkeit bewertet. Wie auch im Beispiel aus dem echten Leben gilt: jede Sekunde zählt.
Videos des Projektseminars Robotik aus den letzten Jahren
Als Aufgabe im SoSe 2024 sollte ein autonomer Roboter realisiert werden, der eigenständig ein Labyrinth erkunden und anschließend verlassen kann. Einen tieferen Einblick liefert das zugehörige Github-Repository.
Im SoSe 2023 war die Aufgabe mithilfe des JetBots eine Sortieraufgabe in einer Arena zu lösen. Dabei stand dem JetBot als einziger Sensor eine Kamera zur Verfügung. Weitere Infos im zugehörigen GitHub-Repository.
Im SoSe 2022 war eine autonome Fahraufgabe nur mithilfe einer Kamera zu lösen. Künstliche Intelligenz spielte zum Lösen dieser Aufgabe eine große Rolle.
Allgemeines
Das Seminar gliedert sich in einen Vorlesungsteil und die Projektarbeit:
Vorlesung
Den Vorlesungsteil hält Prof. Dr.-Ing. J. Adamy. Die Vorlesungstermine liegen in den ersten sechs Wochen des Semesters. In der Vorlesung werden die Grundlagen zu mobilen Robotern und Industrierobotern vermittelt:
- Roboter – Einführung und Historie
- Mobile Roboter
- Typen und Anwendungen
- Sensoren
- Umweltkarten und Kartenaufbau
- Bahnplanung
- Industrieroboter
- Typen und Anwendung
- Geometrie und Kinematik
- Dynamisches Modell
- Regelung von Industrierobotern
Die Inhalte der Vorlesung und des zugehörigen Skriptes werden in einer schriftlichen Prüfung (Klausur) abgefragt.
Projektarbeit
Die Projektarbeit ist als Wettbewerb organisiert, in dem kleine Projektgruppen (3-4 Teilnehmer) jeweils Lösungen zur selben Aufgabenstellung erarbeiten. Die Aufgabenstellung variiert dabei jedes Jahr.
Im Rahmen der Auftaktveranstaltung am ersten Vorlesungstermin werden organisatorische Einzelheiten zum Ablauf des Projektseminars thematisiert und die diesjährige Aufgabenstellung im Detail vorgestellt. Für den Einstieg zur Arbeit mit den Robotern gibt es jedes Jahr ein ausführliches GitHub-Repository.
Der Bearbeitungszeitraum der Projektarbeit ist während der Vorlesungszeit. Zum Abschluss des Projekts findet ein Wettbewerb statt, in dem die einzelnen Gruppen mit ihrem Robotern gegeneinander antreten. Die erzielten Lösungen der Gruppen werden somit untereinander verglichen.
In einem 20-minütigen Abschlussvortrag stellt jede Gruppe ihre Ergebnisse und erarbeiteten Lösungen vor.
Organisatorisches
Es gibt keine individuelle fachliche Betreuung für die einzelnen Gruppen. Die Aufgabenstellung muss selbstständig durchgearbeitet werden und die Lösungsansätze müssen selbst erarbeitet werden. Organisatorische Fragen werden natürlich beantwortet.
Hilfreiche (aber nicht notwendige) Vorkenntnisse für das Projektseminar sind:
- Programmierkenntnisse (Python/Matlab/C/C++)
- Regelungstechnische Kenntnisse
- Fuzzy-Logik/Neuronale Netze/Evolutionäre Algorithmen
- Grundlagen zu Linux/git/ROS
- Fähigkeit zur Projektarbeit in einer Gruppe
Wichtig: Die Kenntnisse zum spezifischen Lösen der Aufgabenstellung können und sollen während des Projektseminars erarbeitet werden! Dies gilt insbesondere für die programmiertechnischen Basics, welche nicht in der Vorlesung vermittelt werden. Im Rahmen des zugehörigen git-Repositories werden für die Programmier-Grundlagen ausführliche Anleitungen zur Verfügung gestellt.
Die Gesamtnote setzt sich aus der Projektarbeit und der Klausur zusammen.
Weitere Informationen werden in Moodle veröffentlicht, wenn der entsprechende Kurs freigeschaltet ist. Bei Fragen wenden Sie sich bitte an Linus Groß
Termine Projektseminar
| Vorlesung (V1) | |
|---|---|
| Termin |
Fr 9.50h – 11.30h |
| Ort |
S306 | 053 |
| Dozent | Prof. Dr.-Ing. J. Adamy |
| Projekt (P3) | |
| Ansprechpartner | Linus Groß |
| Bearbeitungszeitraum |
Während der Vorlesungszeit (22.04.2025 – 25.07.2025) |
| Abschlusspräsentation | Di, 22.07.2025, 13:30 – 18:00 in S101|A03 |
| Wettbewerb | Do, 24.07.2025, 13:00 – 18:00 in S310|406 |
| Prüfung | |
| Termin | Di, 19. Aug 2025 9:00 – 11:00 |
| Ort | siehe TUCaN |
| Prüfungsrelevante Inhalte | Vorlesung + Skript |
| ECTS (Vorlesung + Übung) | 8 |
Unterlagen und allgemeine Literaturhinweise
J. Adamy, Robotik und künstliche Intelligenz, Skript, 8. Auflage, 2010.
Das Skript ist für Teilnehmende des Kurses in Moodle verfügbar.
Evaluierungen
- Projektseminar Robotik und Computational Intelligence SS2011 (PDF-Datei, 72kB)
- Projektseminar Robotik und Computational Intelligence SS2012 (PDF-Datei, 72kB)
- Projektseminar Robotik und Computational Intelligence SS2013 (PDF-Datei, 78kB)
- Projektseminar Robotik und Computational Intelligence SS2014 (PDF-Datei, 79kB)
- Projektseminar Robotik und Computational Intelligence SS2015 (PDF-Datei, 63kB)
- Projektseminar Robotik und Computational Intelligence SS2017 (PDF-Datei, 63kB)
- Projektseminar Robotik und Computational Intelligence SS2018 (PDF-Datei, 62kB)
- Projektseminar Robotik und Computational Intelligence SS2019 (PDF-Datei, 68kB)
- Projektseminar Robotik und Computational Intelligence SS2022 (PDF-Datei, 51kB)
- Projektseminar Robotik und Computational Intelligence SS2023 (PDF-Datei, 67kB)
- Projektseminar Robotik und Computational Intelligence SS2024 (PDF-Datei, 56kB)

