
The course language is German.
Students who attend this course should be aware that the latest information is available on the German version of the website. Please contact the research assistant for further details.
Project Seminar Robotics (V1+P3)

Every year in the summer semester, the RIS offers the project seminar *Robotics and Computational Intelligence*. This is a unique opportunity to unleash your engineering creativity in a hands-on setting with a mobile robot. As part of the project work, you will collaborate in teams of 3-4 students to tackle a task in the field of mobile robotics.

Each group receives a mobile robot of the type “MentorPi”, which must navigate a maze autonomously.
You decide which approaches your robot will use to solve the given task. You have complete freedom in planning, implementing, and solving the challenges.
Work together with your team and compete against other groups in the final competition. In the end, what matters most is: Which team develops the best solution strategies for their robot?
Structure

Robots are often used in situations that are too unpleasant (dirty), too dangerous (dangerous), or too monotonous (dumb) for humans.
This semester's focus is on search-and-rescue tasks, where mobile robots are deployed to locate and/or rescue victims of natural disasters.
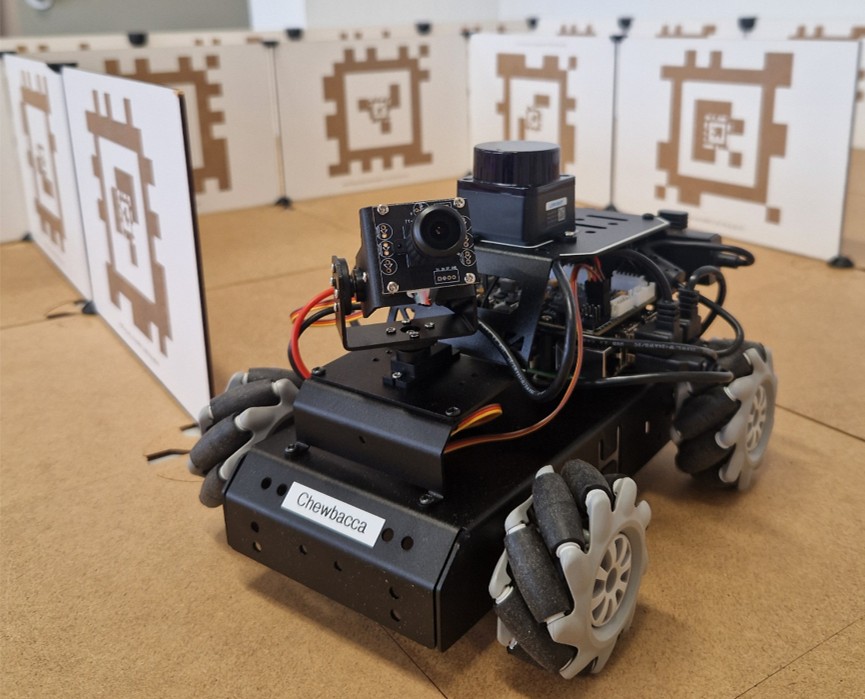
Each group receives its own robot. In the project seminar, the goal is to develop an autonomous robot that can independently explore and then exit a maze, using its camera and additional sensors for navigation.
Key requirements for this task include localization and mapping within an unknown maze. The solution will be evaluated based on efficiency and speed. As in real-life scenarios, every second counts.
A glimpse into our project seminar …
The task for the summer semester 2024 was to develop an autonomous robot that can independently explore a maze and then exit it. A deeper insight can be found in the corresponding git-Repository.
In the summer semester 2023, the task was to solve a sorting challenge in an arena using the JetBot. The JetBot had only a camera as its sole sensor. Further information can be found in the corresponding git-Repository.
In the summer semester 2022, an autonomous driving task had to be solved using only a camera. Artificial intelligence played a major role in completing this task.
General Information
The seminar consists of a lecture part and a project part.
Project Work
The project work is organized as a competition, where small project groups (3-4 participants) develop solutions for the same task. The task varies each year.
During the kickoff event in the first lecture session, organizational details of the seminar are discussed, and the specific task for the current year is presented in detail.
At the end of the project, a competition takes place, where teams compete against each other with their robots. This allows for a direct comparison of the solutions developed by each group. A comprehensive Git repository is provided each year to facilitate the initial work with the robots.
Lecture
The lecture is given by Prof. Dr.-Ing. J. Adamy and takes place in the first six weeks of the semester. The lecture is held in german. It covers fundamental topics on mobile and industrial robots, including:
- Introduction and history of robotics
- Mobile robots
- Types and Applications
- Sensors
- Environmental mapping and map generation
- Path planning
- Industrial robots
- Types and applications
- Geometry and kinematics
- Dynamic modeling
- Control of industrial robots
The lecture content and the accompanying script will be assessed in a written exam.
Organizational Matters
There is no individual technical supervision for the groups. The task must be worked through independently, and solution approaches must be developed by the participants themselves. However, organizational questions will be answered.
Helpful (but not mandatory) prerequisites for the seminar include:
- Programming skills (Python/Matlab/C/C++)
- Control theory knowledge
- Fuzzy logic, neural networks, evolutionary algorithms
- Basics of Linux, Git, and ROS
- Ability to work on a project in a team
Important: The knowledge required to solve the specific task can and should be acquired during the seminar! This is particularly true for basic programming skills, which are not covered in the lecture. The Git repository provides extensive tutorials for programming fundamentals.
Further information will be published on Moodle once the course is available.For questions, please contact Linus Groß
| Vorlesung (V1) | |
|---|---|
| when | Fr 9.50h – 11.30h |
| where | S306 | 053 |
| who | Prof. Dr.-Ing. J. Adamy |
| Project (P3) | |
| who | Linus Groß |
| duration | During the lecture period (April 22, 2025 – July 25, 2025) |
| competition date | TBA (expected in the last lecture week, KW30, July 21–25, 2025) |
| date final presentation | tba |
| examen | |
| date | Tuesday, August 19, 2025, 9:00–11:00 |
| where | see TUCaN |
| exam-relevant content | lecture + script |
| ECTS (Credit Points) | 8 |
Documents and general references
**J. Adamy, *Robotik und Künstliche Intelligenz*, Script, 8th Edition, 2010.**
The script is available for course participants on Moodle.

