Technical assistance systems in medicine are creating enormous progress in treatment, thus improving quality of life. The basic idea is to support the physician in several applications such as minimally invasive surgery. Here, interventions are performed using surgical instruments through natural body orifices or through small incisions in order to reduce trauma and shorten the recovery time for the patient. The lack of direct interaction with the tissue results in the loss of the surgeon's tactile sense. Therefore, the integration of force sensors in such instruments is mandatory to re-establish the tactile sense through haptic feedback. Such sensor integration in assistance systems as well as in medical instruments is one of the main research topics at our department.
Dental Measurement Technology
The functionality of the temporomandibular joint and surrounding structures is essential for fundamental activities such as chewing, speaking, and swallowing. Disorders within this system, such as temporomandibular dysfunction (TMD) or dysgnathia, can significantly impact patients' quality of life. However, the diagnostics and treatment of these conditions often rely on subjective assessments and clinical observations, which offer limited accuracy.
In cooperation with the Goethe University Frankfurt (Dragana Gerovac, PD. Dr. Paul Weigl, Prof. Dr. Dr. Dr. Robert Sader) and the University Medical Center Mainz (PD. Dr. Dr. Daniel Thiem), we are therefore researching dental measurement technology. Several different measuring systems have been realized.

A sensor for bilateral bite force measurements that enables precise assessment of bite force asymmetries. With a height of only 9 mm and a nominal force capacity of 1000 N, it combines low measurement uncertainty with the ability to measure bilaterally across the dental arch. This allows for identifying localized overloads and comprehensively evaluating the masticatory system's functionality. For more information, see the related publication.
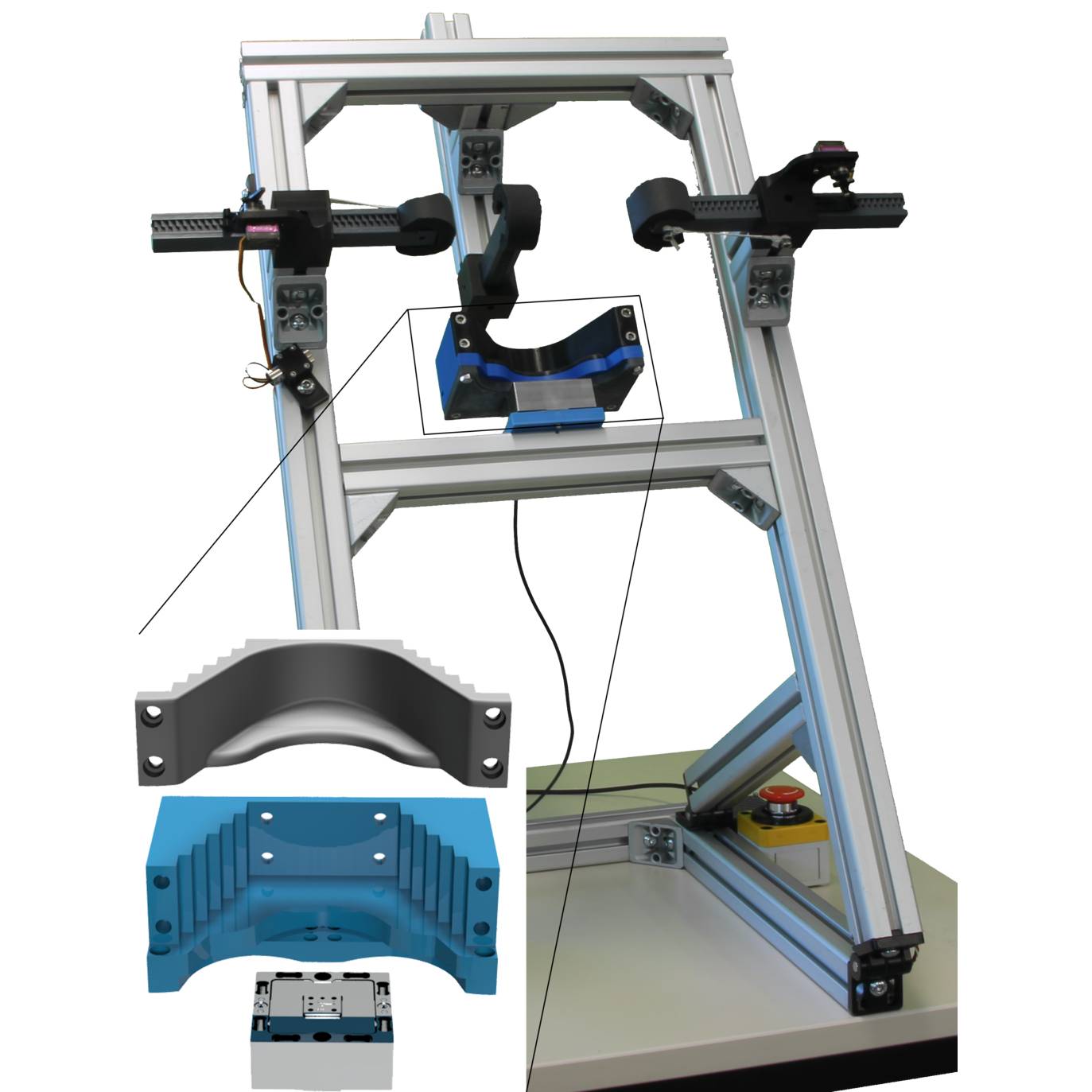
A lateral jaw force measurement system that measures isometric forces in all translational directions of the mandible. With a modular mandibular holder and three-dimensional force measurement, this system enables a detailed analysis of the muscles responsible for masticatory movements. It has already been shown that the system can accurately measure lateral and protrusive forces, which can support new diagnostic and therapeutic approaches. Further information in the publication.
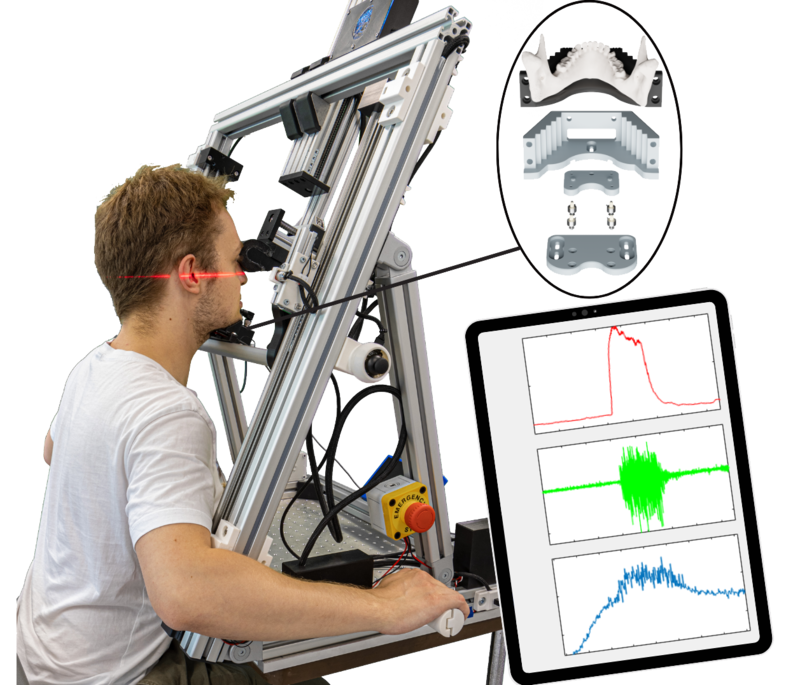
A complex jaw measurement system for the simultaneous measurement of jaw opening forces, symmetry, electromyography (EMG) and pain feedback during dynamic mouth opening. This system provides a novel method for analyzing the functionality of the temporomandibular joint under dynamic conditions to close diagnostic gaps in conditions such as craniomandibular dysfunction (CMD). Further information in the publication.
Needle Tip Force Sensor
Percutaneous needle insertion into soft tissue is required in many medical procedures such as brachytherapy or biopsies. Due to the small size of the needles (Ø1 mm) and the usually low to absent haptic feedback, there is a risk of damaging delicate structures such as nerves or vessels during the insertion process. We conduct research on the development of sensor-integrated needles for needle tip force measurements in order to provide haptic feedback to minimize tissue damage.
-
![]()
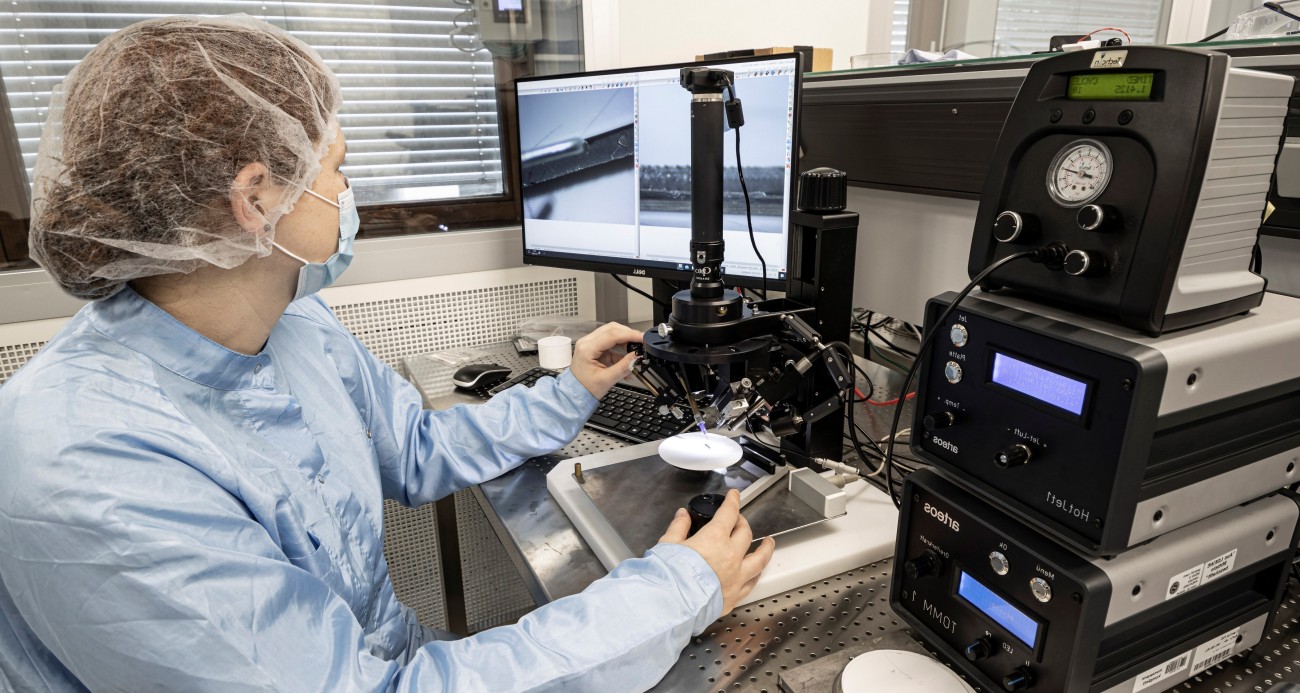
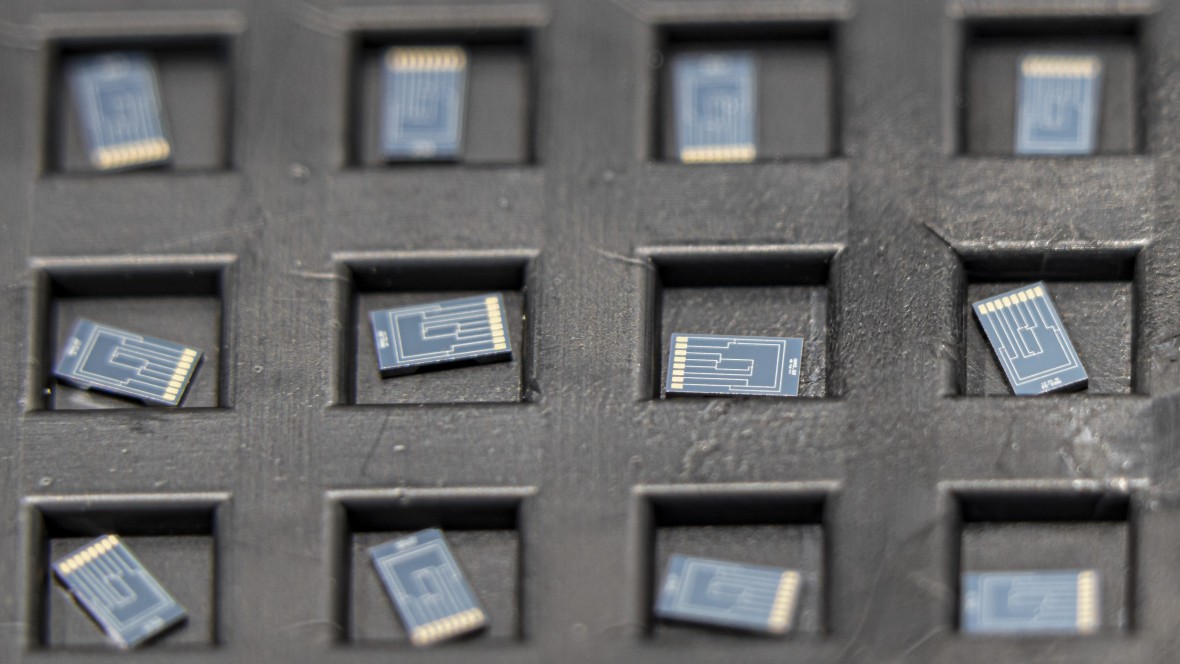
Silicon strain gauges as sensor elements for force measurement at the needle tip. -
![]()
A co-manipulation system is set up using the haptic interface omega.7 from force dimension. The needle tip force serves as input parameter to enable haptic feedback. -
![]()
Design of the modular needle tip based on a disruptive manufacturing process in which two needle halves are glued together after application of the sensor element.


- Go to picture 1
- Go to picture 2
- Go to picture 3
For measuring the needle tip force, specially developed silicon strain gauges are integrated into the needle tip due to their small dimensions (1.8mm x 1mm) and high sensitivity. In addition to the application of the sensor element in a thinned area near the needle tip (for further information we refer to the publication), a patented disruptive manufacturing approach (patent) is also pursued.
Robot-guided Needle Insertion
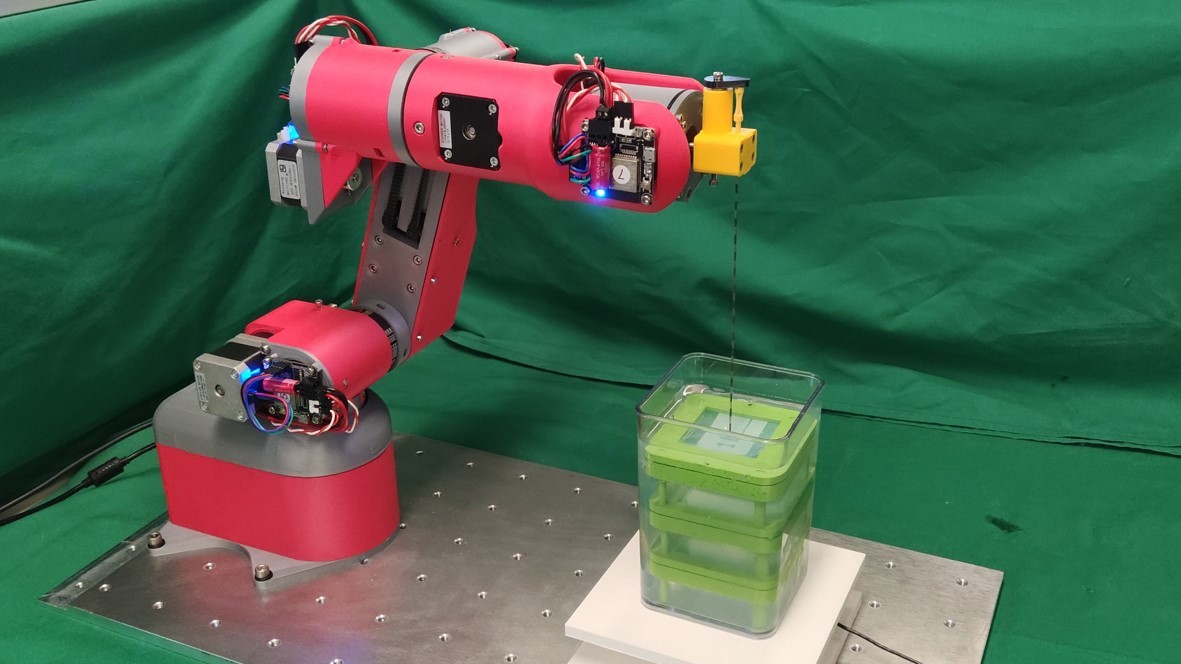
In addition to approaches such as haptic feedback in training scenarios or assistive means for interventions, a robot-guided needle insertion provides further advantages in terms of positioning accuracy. For this purpose, a 6-axis low-cost articulated robot was developed and manufactured using 3D printing (article), which was funded by the RMU Initiative.The cost-effective manufacturing offers optimal conditions for replications and for teaching purposes.
-
![]()
Simulation of a robot-guided needle insertion in a gelatin tissue phantom. -
![]()
Low-cost articulated robot performing needle insertion in a gelatin phantom with inserted foils as membranes. -
![]()
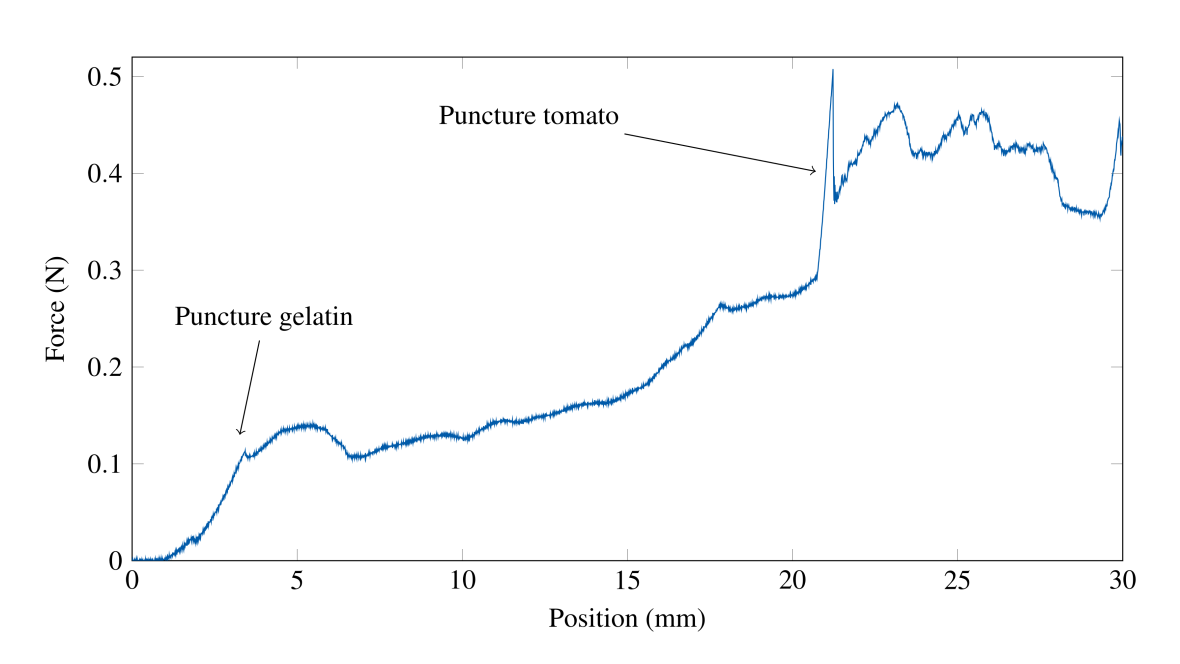
Exemplary force characteristic of a needle insertion in a tissue phantom made of gelatin with an inserted tomato as target.

- Go to picture 1
- Go to picture 2
- Go to picture 3
In Vivo Pulse Measurement
Flexible, biocompatible ferroelectret sensors for in-vivo pulse measurement with high sensitivity and shielding against electromagnetic interference represent an important approach in biosignal monitoring. The sensor structure is fabricated using PLA film and 3D-printed filament, thermally bonded, and fully encapsulated with biocompatible silicone. Initial tests show promising suitability for precise heart rate monitoring in medical applications. The focus is on enabling reliable and cost-effective solutions for long-term use.
For more information, see the related Publication.
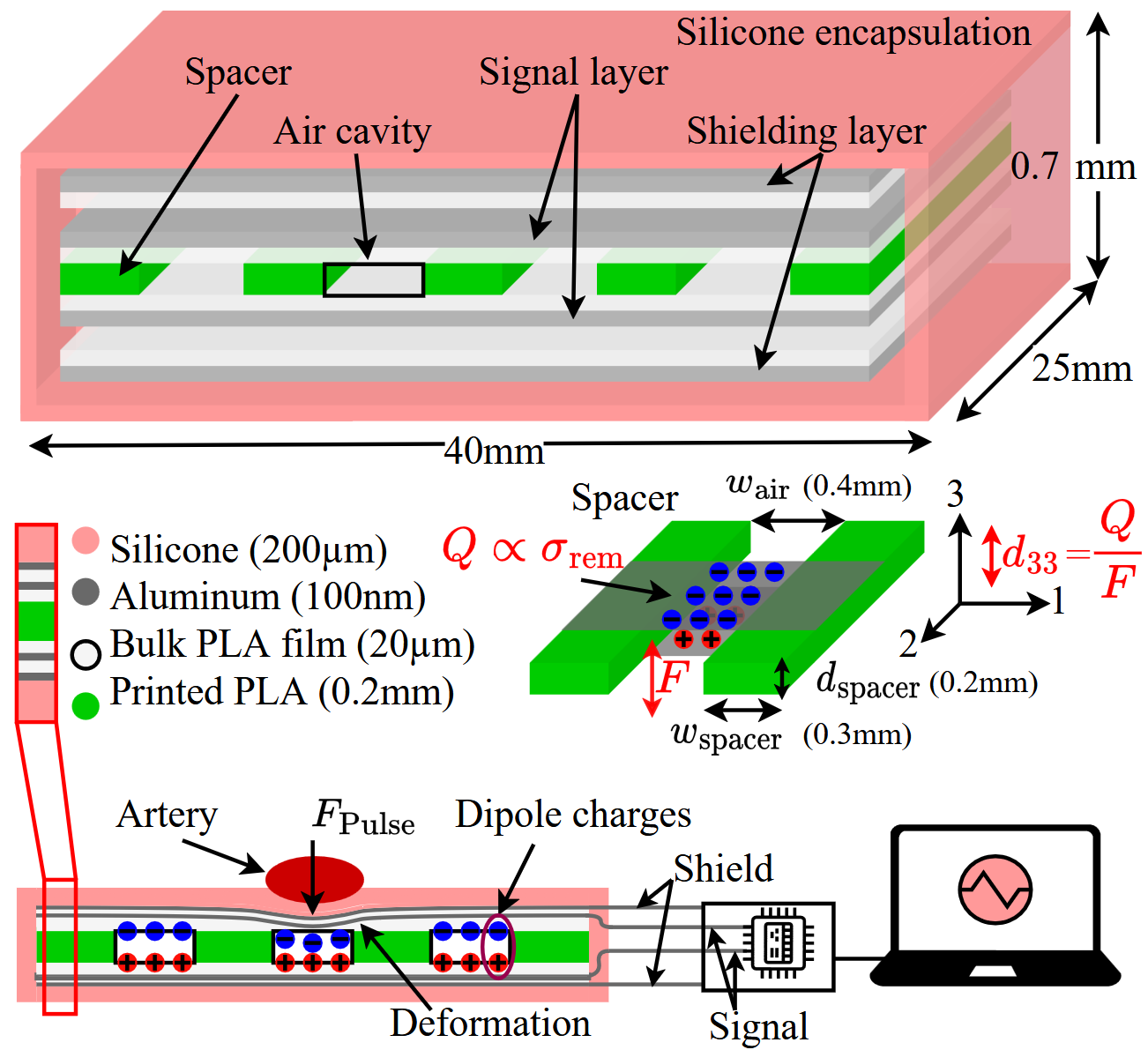
Schematic representation of a biocompatible ferroelectret sensor with silicone encapsulation (pink), shielding (grey), 3D-printed spacers (green), and deformable PLA film (white) for real-time pulse measurement.
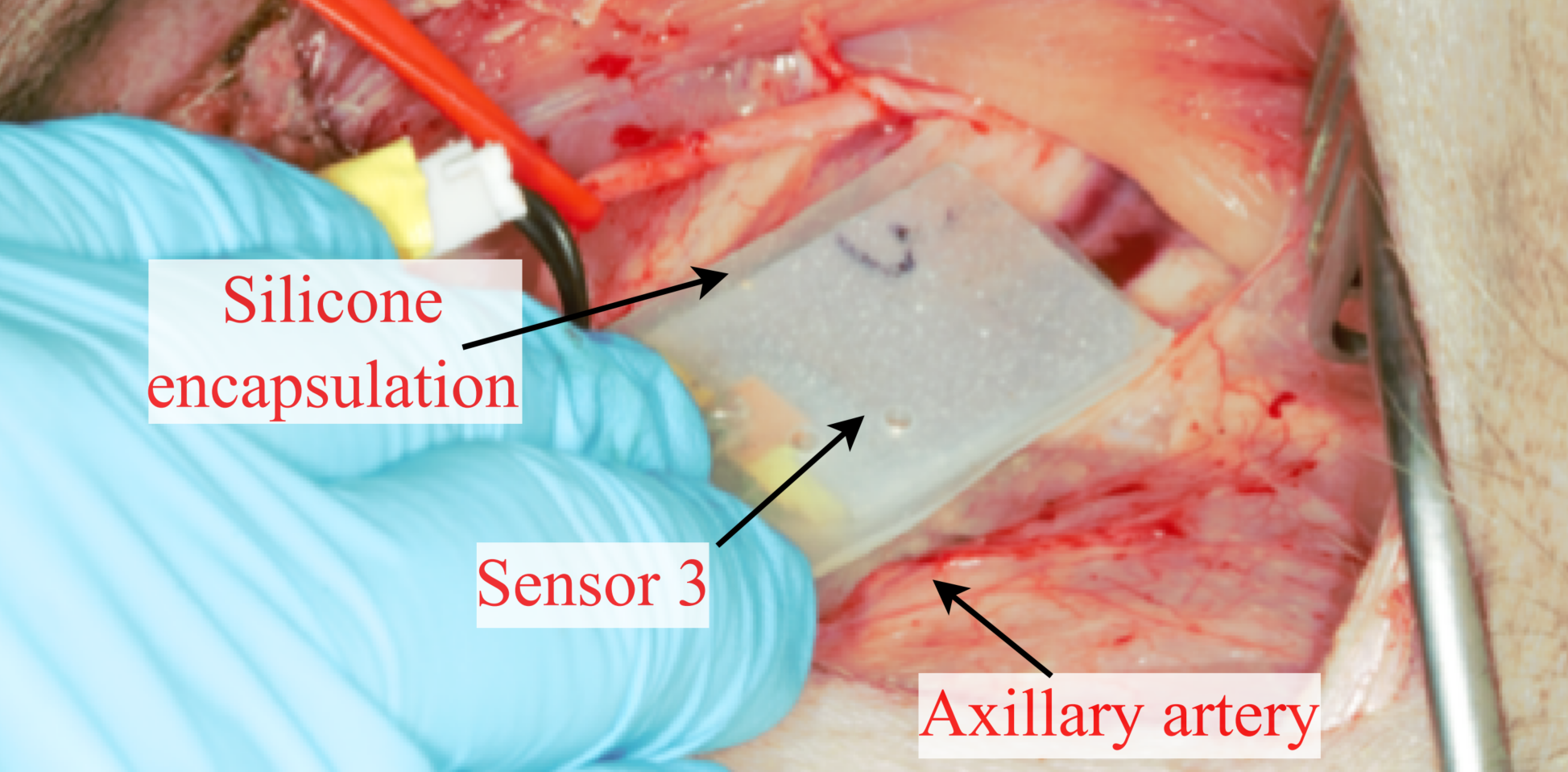
In-vivo experiment with a biocompatible, silicone-encapsulated ferroelectret sensor for pulse measurement.
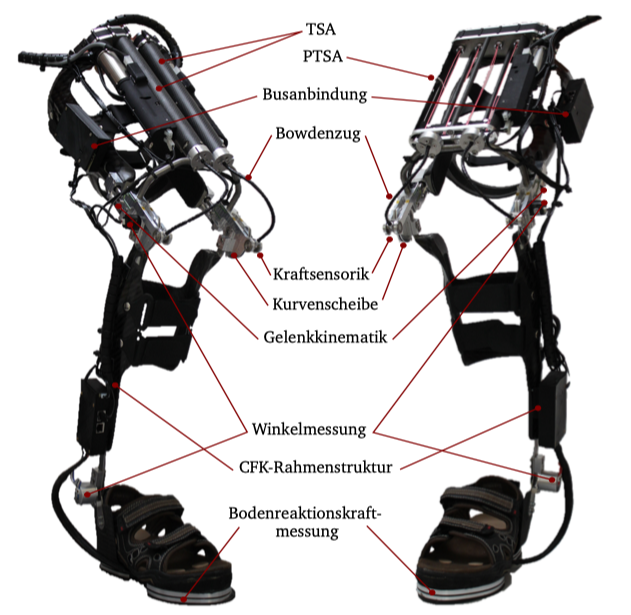
Active Knee-Ankle-Foot-Orthosis
Active support of people with walking impairments by means of an adaptive knee joint orthosis is intended to effectively assist the user during daily movements of the lower limbs, thus coping with their individual daily lives. The use of parallel twisted string actuators serves to efficiently convert the energy applied by the motor into a defined torque in the knee joint.