Der Einsatz technischer Assistenzsysteme in der Medizin schafft einen enormen Fortschritt der Behandlungsmöglichkeiten und damit eine Verbesserung der Lebensqualität. Grundgedanke ist hierbei stets die Unterstützung des behandelnden Arztes und nicht seine Ersetzung. Ein Klassiker hierfür ist die Minimalinvasive Chirurgie. Hier werden Eingriffe mittels medizinischer Instrumente durch natürliche Körperöffnungen oder das Setzen kleiner Einschnitte vorgenommen, um ein reduziertes Trauma und schnellere Heilungszeiten zu ermöglichen. Durch die dabei fehlende direkte Interaktion mit dem Gewebe verliert der behandelnde Arzt seinen Tastsinn. Mittels strukturintegrierter Kraftsensorik in solchen Instrumenten ist die Herstellung des Tastsinns durch haptisches Feedback wieder möglich. Solch eine Sensorintegration in Assistenzsysteme sowie in medizinischen Instrumenten wird am Fachgebiet für Mess- und Sensortechnik erforscht.
Dentale Messtechnik
Die Funktionsfähigkeit des Kiefergelenks und der umgebenden Strukturen ist essenziell für grundlegende Aktivitäten wie Kauen, Sprechen und Schlucken. Störungen in diesem System, wie sie beispielsweise bei der Craniomandibulären Dysfunktion (CMD) oder Dysgnathien auftreten, können erhebliche Auswirkungen auf die Lebensqualität der Betroffenen haben. Diagnostik und Therapie solcher Erkrankungen stützen sich jedoch bisher oft auf subjektive Beurteilungen und klinische Beobachtungen, die nur begrenzte Aussagekraft bieten.
In Zusammenarbeit mit der Goethe-Universität Frankfurt (Dragana Gerovac, PD. Dr. Paul Weigl, Prof. Dr. Dr. Dr. Robert Sader) und der Universitätsmedizin Mainz (PD. Dr. Dr. Daniel Thiem) forschen wir daher an dentaler Messtechnik. Dabei wurden mehrere verschiedene Messsysteme realisiert.

Ein Sensor für bilaterale Bisskraftmessungen, der es ermöglicht, Asymmetrien in der Bisskraft präzise zu erfassen. Mit einer Höhe von nur 9 mm und einer Nennkraft von 1000 N kombiniert er geringe Messunsicherheiten mit der Fähigkeit, gleichzeitig auf beiden Seiten der Zahnreihe zu messen. Dadurch können lokale Überlastungen erkannt und die Funktion des Kauapparates umfassend bewertet werden. Weitere Informationen in der Veröffentlichung.
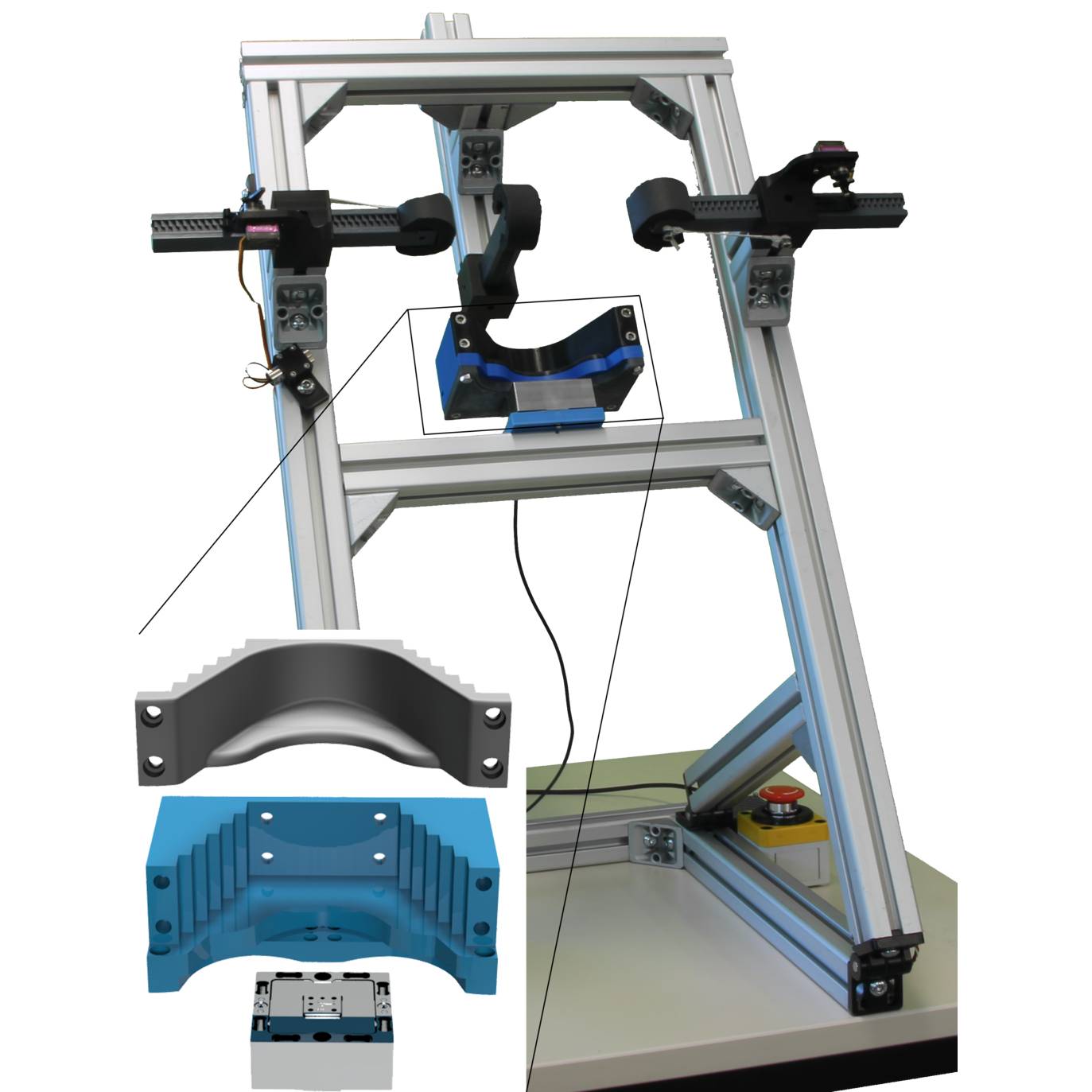
Ein Messsystem für laterale Kieferkräfte, das isometrische Kräfte in allen translatorischen Richtungen der Mandibula misst. Mit einem modularen Unterkieferhalter und einer dreidimensionalen Kraftmessung ermöglicht dieses System eine detaillierte Analyse der Muskeln, die für die Kaubewegungen verantwortlich sind. Es konnte bereits gezeigt werden, dass das System präzise laterale und protrusive Kräfte messen kann, wodurch neue diagnostische und therapeutische Ansätze unterstützt werden können. Weitere Informationen in der Veröffentlichung.
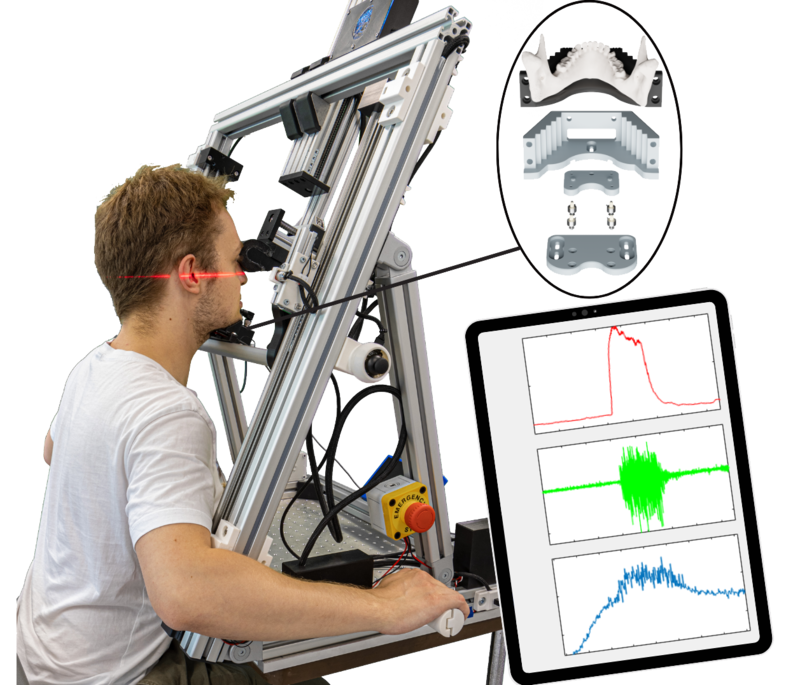
Ein komplexes Kiefermesssystem zur simultanen Messung von Kieferöffnungskräften, Symmetrie, Elektromyographie (EMG) und Schmerzfeedback während einer dynamischen Mundöffnung. Dieses System bietet eine neuartige Methode zur Analyse der Funktionalität des Kiefergelenks unter dynamischen Bedingungen, um diagnostische Lücken bei Erkrankungen wie der Craniomandibulären Dysfunktion (CMD) zu schließen. Weitere Informationen in der Veröffentlichung.
Nadelsensor
Perkutane Nadeleinstiche in Weichgewebe sind bei vielen medizinischen Eingriffen, wie beispielsweise bei Biopsien, erforderlich. Aufgrund der geringen Größen der Nadeln (Ø1 mm) und des meist geringen bis fehlenden haptischen Feedbacks besteht die Gefahr beim Einstich empfindliche Strukturen, wie Nerven oder Gefäße, zu verletzen. Unsere Forschung beschäftigt sich mit der Entwicklung von sensorintegrierten Nadeln zur Messung der Nadelspitzenkraft, um ein haptisches Feedback zur Minimierung von Gewebeschäden zu ermöglichen.
-
![]()
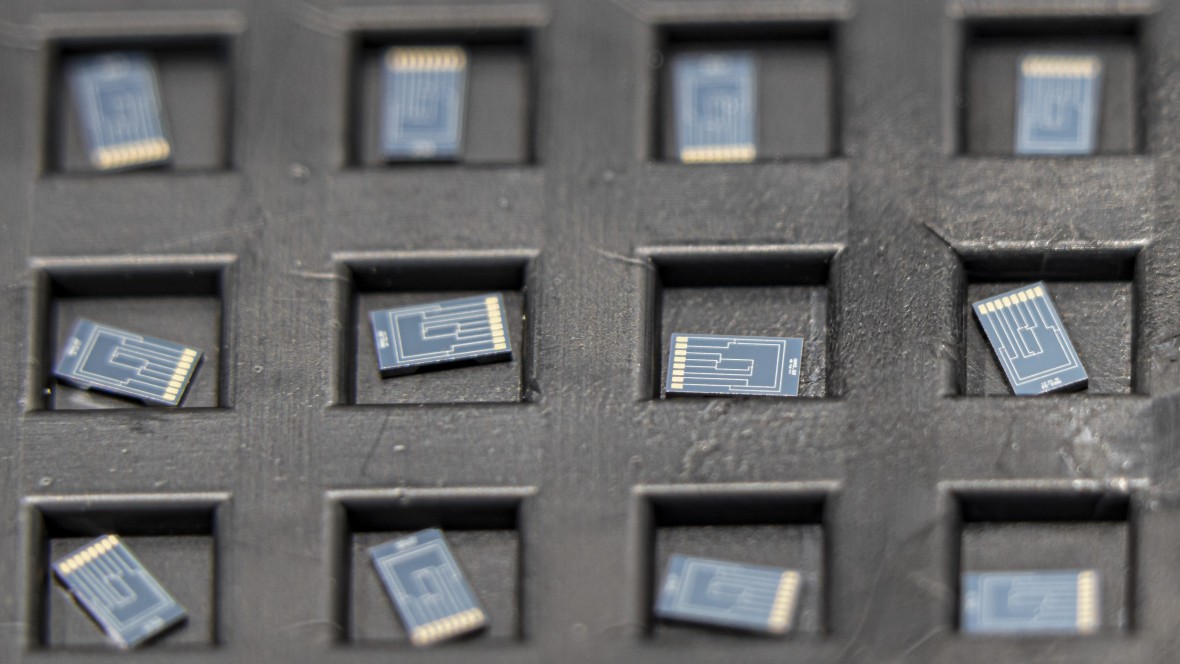
Silizium-Dehnungsmessstreifen als Sensorelemente für die Kraftmessung an der Nadelspitze. -
![]()
Mit Hilfe des haptischen Interfaces omega.7 von force dimension lässt sich ein Co-Manipulationssystem aufbauen. Dabei dient die Nadelspitzenkraft als Eingangsgröße für das haptische Feedback. -
![]()
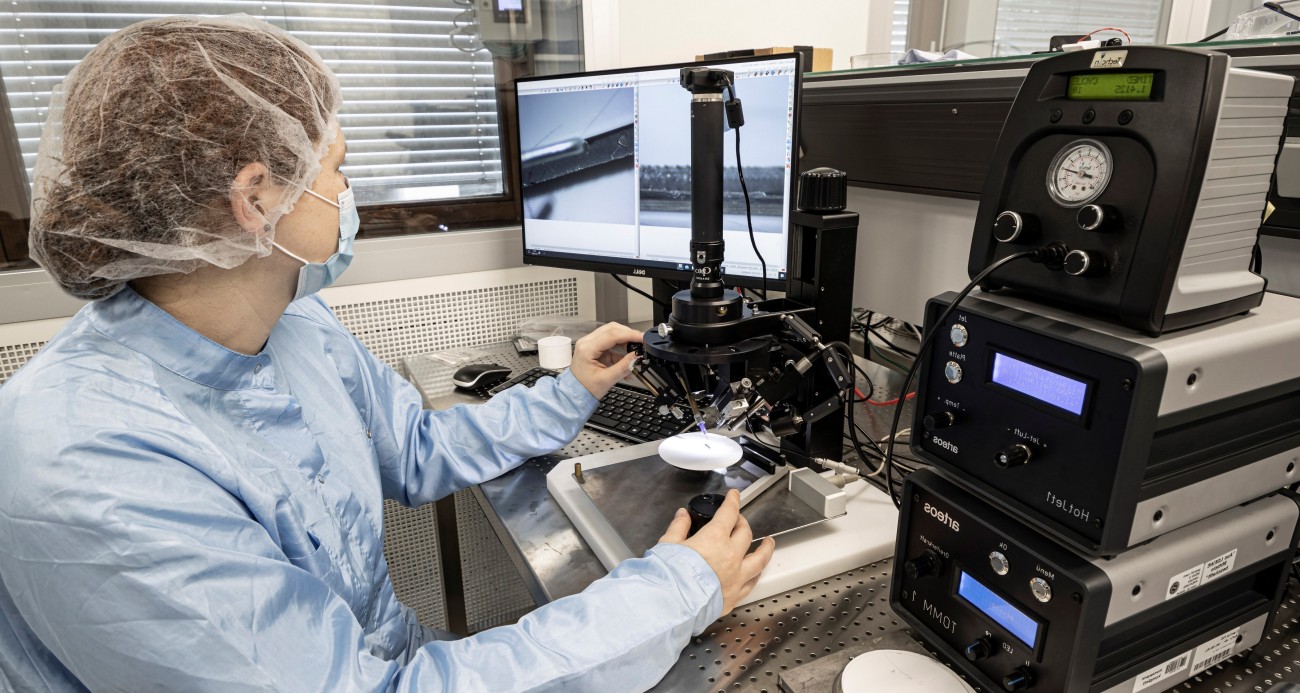
Aufbau der modularen Nadelspitze basierend auf einem disruptiven Herstellungsprozess bei dem zwei Nadelhälften nach Applikation des Sensorelements miteinander verklebt werden.


- Gehe zu Bild 1
- Gehe zu Bild 2
- Gehe zu Bild 3
Zur Messung der Nadelspitzenkraft werden eigens entwickelte Silizium-Dehnungsmessstreifen aufgrund ihrer kleinen Abmessungen (1,8mm x 1mm) und hoher Empfindlichkeit in die Nadelspitze integriert. Dazu wird neben der Applikation des Sensorelements in einem in der Nähe der Nadelspitze abgedünnten Bereichs (weitere Informationen siehe Veröffentlichung) auch ein patentierter disruptiver Herstellungsansatz (Patent) verfolgt.
Robotergestützter Nadeleinstich
Zusätzlich zum Aufbau von Trainings- und Assistenzsystemen mit haptischem Feedback bringt ein robotergestützter Nadeleinstich weitere Vorteile hinsichtlich Positioniergenauigkeit mit sich. Hierzu wurde ein 6-Achsen Low-Cost-Knickarmroboter mittels 3D-Druck (Artikel) entwickelt und aufgebaut, welcher im Rahmen des RMU-Initiativfonds Lehre gefördert wurde. Die günstige Herstellung bietet optimale Voraussetzungen für Replikationen und den Einsatz in der Lehre.
-
![]()
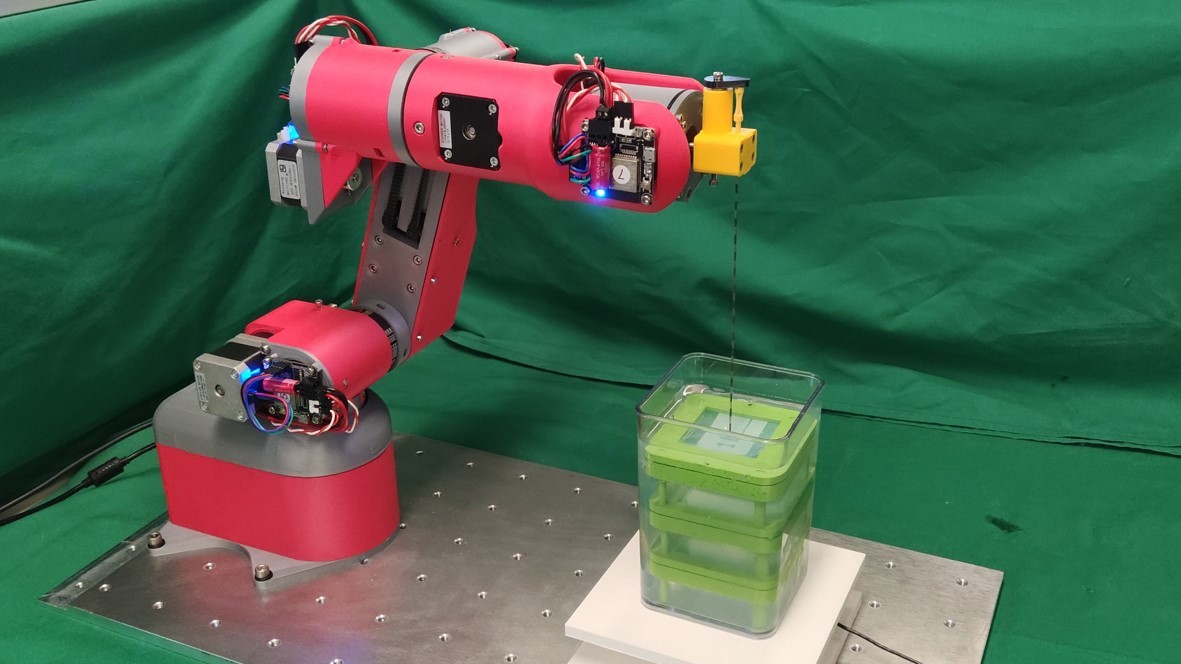
Simulation eines robotergeführten Nadeleinstichs in ein Gewebephantom aus Gelatine. -
![]()
Low-Cost Knickarmroboter beim Nadeleinstich in einem Gelatinephantom mit eingelegten Folien als Membransimulation. -
![]()
Beispielhafter Kraftverlauf eines Nadeleinstichs in einem Gewebephantom aus Gelatine mit einer eingelegter Kirschtomate als Target.


- Gehe zu Bild 1
- Gehe zu Bild 2
- Gehe zu Bild 3
In Vivo Pulsmessung
Flexible, biokompatible Ferrolektretsensoren zur in-vivo-Pulsmessung mit hoher Sensitivität und Abschirmung gegen elektromagnetische Störungen sind ein wichtiger Ansatz in der Biosignalüberwachung. Die Sensorstruktur wird aus PLA-Folie und 3D-gedrucktem Filament hergestellt, thermisch verbunden und vollständig mit biokompatiblem Silikon eingekapselt. Erste Tests zeigen eine vielversprechende Eignung für die präzise Herzfrequenzüberwachung in medizinischen Anwendungen. Der Fokus liegt darauf, zuverlässige und kostengünstige Lösungen für langfristige Anwendungen zu ermöglichen.
Weitere Informationen in der Veröffentlichung.
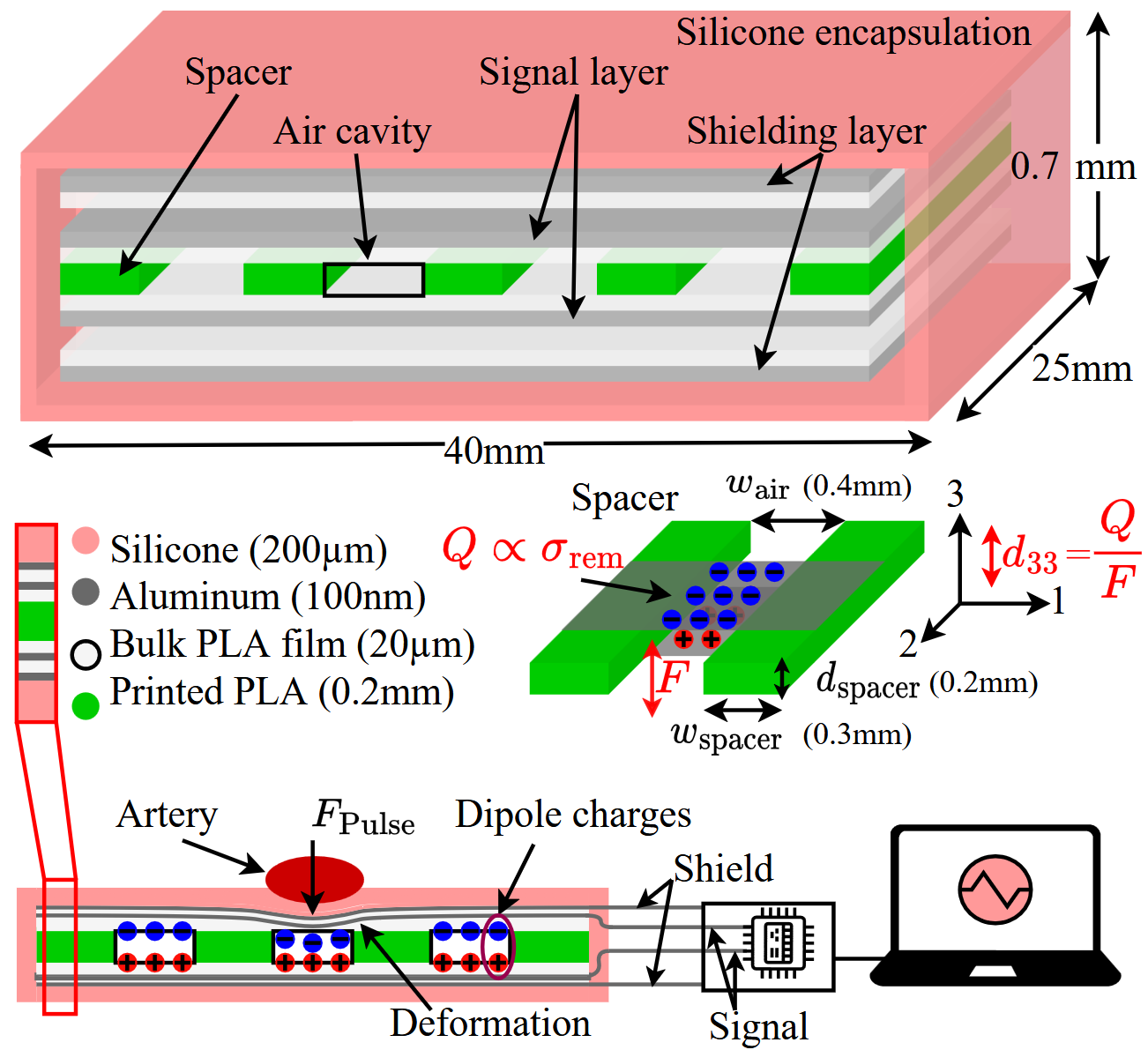
Schematische Darstellung eines biokompatiblen Ferrolektretsensors mit Silikonkapselung (pink), Abschirmung (grau), 3D-gedruckten Abstandshaltern (grün) und verformbarer PLA-Folie (weiß) zur Echtzeit-Pulsmessung.
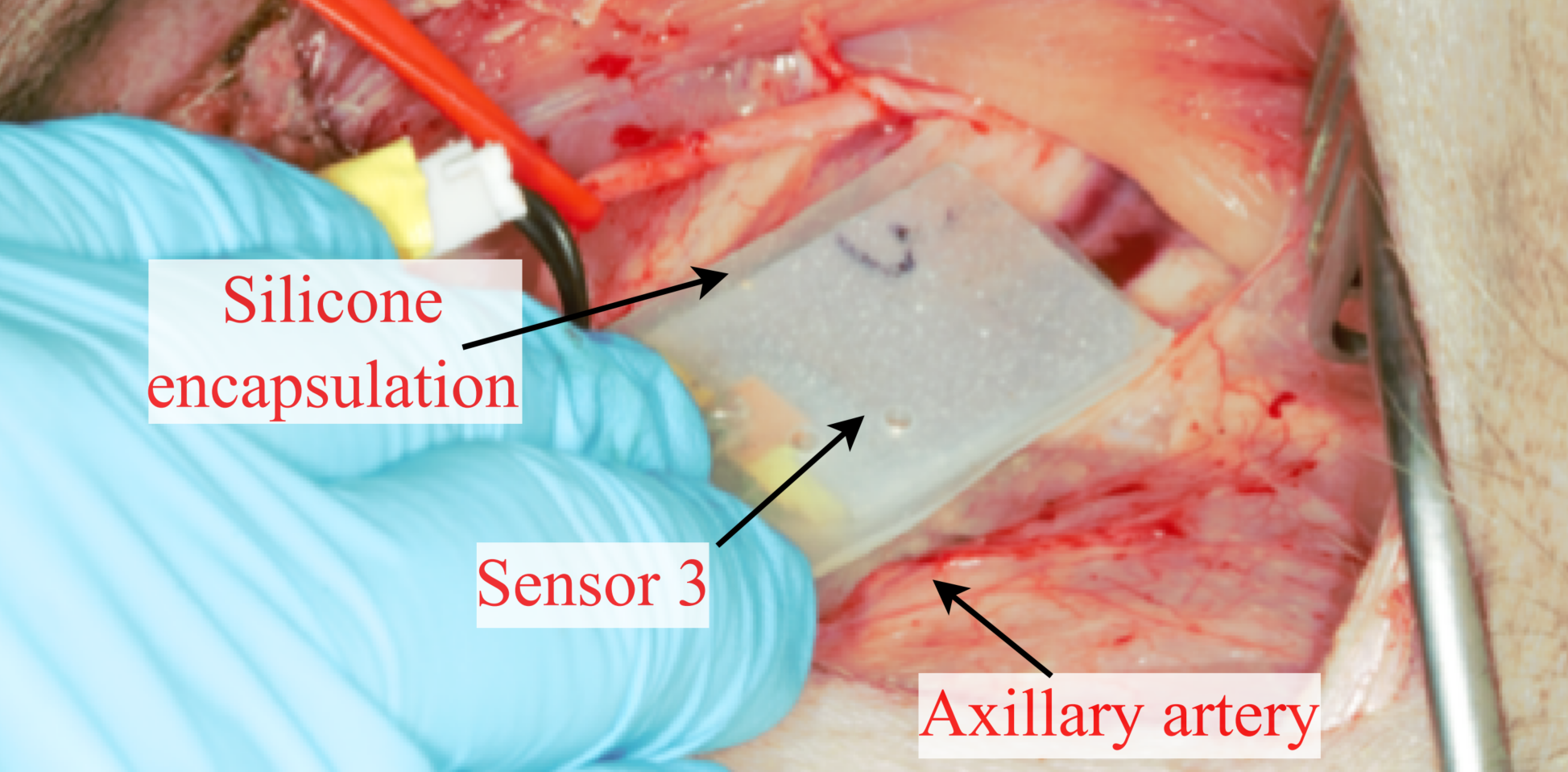
In-vivo-Versuch mit einem biokompatiblen, silikongekapselten Ferrolektretsensor zur Pulsmessung.
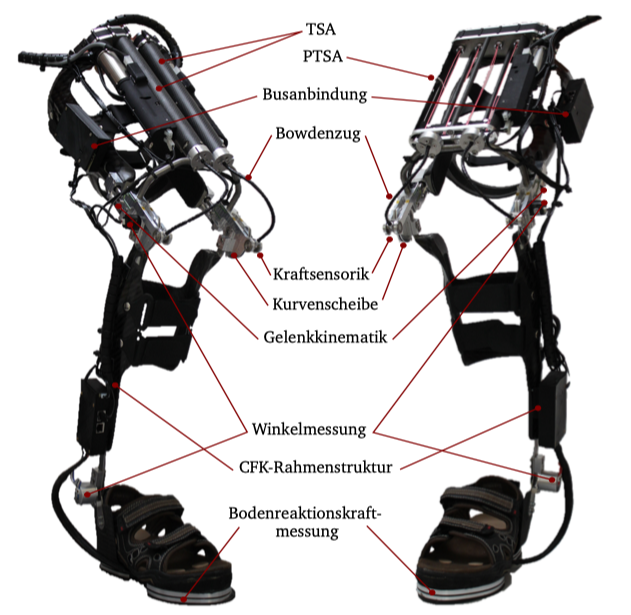
Aktive Kniegelenkorthese
Die aktive Unterstützung gehbeeinträchtigter Menschen durch eine adaptive Kniegelenkorthese soll den Nutzenden weiterhin eine unabhängige Bewältigung ihres Alltags ermöglichen. Der Einsatz parallel angeordneter Twisted String Aktoren dient der effizienten Umformung, der vom Motor aufgebrachten Energie, in ein definiertes Drehmoment im Kniegelenk.