Die Interaktion zwischen Mensch und Maschine spielt eine zentrale Rolle in zahlreichen Anwendungen – von unterstützenden Technologien wie Exoskeletten, Orthesen und Prothesen bis hin zu industriellen Assistenzsystemen und Robotik. Besondere Herausforderungen entstehen, wenn Maschinen direkt mit dem Menschen zusammenarbeiten, sei es zur Unterstützung der Mobilität, bei der Rehabilitation, bei der Steuerung von Roboterarmen oder zur Steigerung der körperlichen Leistungsfähigkeit. Für eine erfolgreiche und sichere Interaktion ist eine präzise Erfassung des menschlichen Verhaltens ebenso essenziell wie eine zuverlässige Sensorik, benutzerfreundliche Schnittstellen und intuitive Interaktionsstrategien.
Das Fachgebiet Mess- und Sensortechnik (MUST) baut hierbei auf umfangreiche Kompetenzen im Hardware-Design sowie auf die interdisziplinäre Zusammenarbeit im Rahmen des Graduiertenkollegs LokoAssistder Deutschen Forschungsgemeinschaft (DFG). Nur die Kooperation mit Forschungsgruppen unterschiedlicher Fachdisziplinen erlaubt es, die interdisziplinären Herausforderungen, die bei der Entwicklung solcher Assistenzsysteme auftreten, zu bewältigen. Somit können Systeme entwickelt werden, die nicht nur technologisch fortschrittlich, sondern auch optimal auf die Bedürfnisse des Menschen abgestimmt sind.
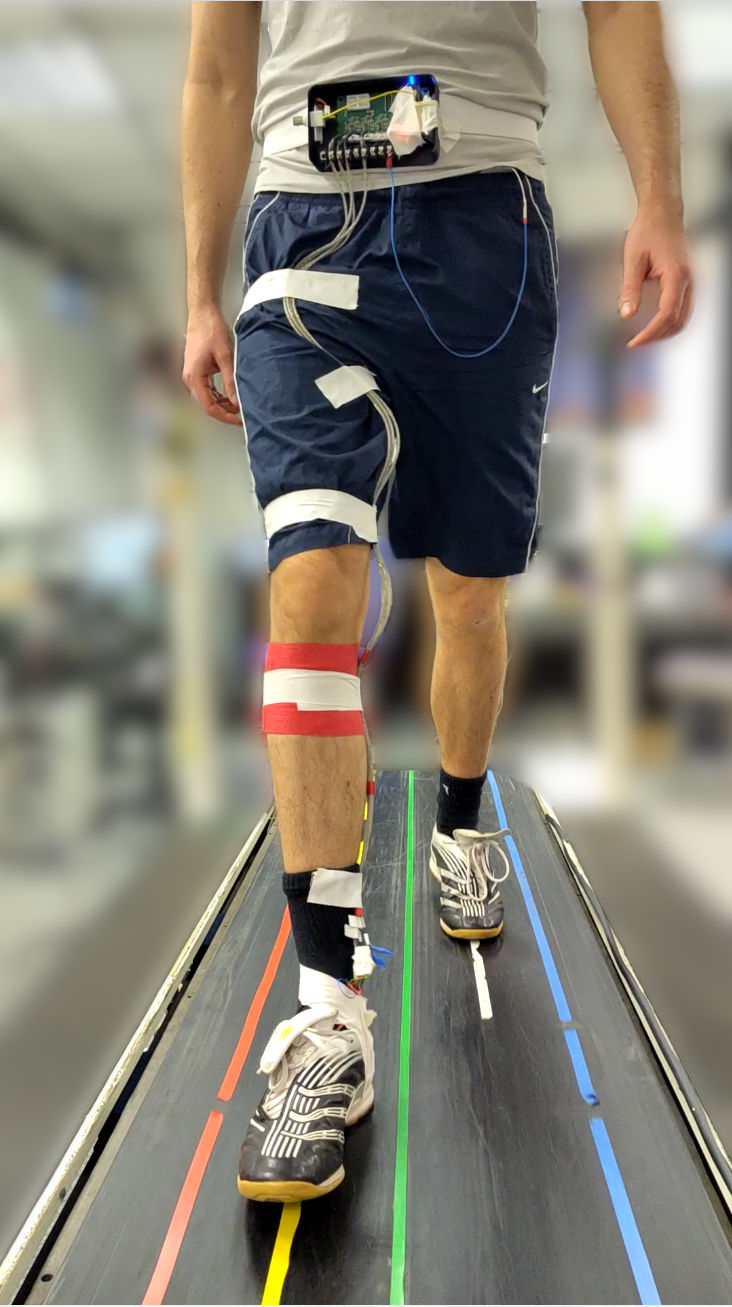
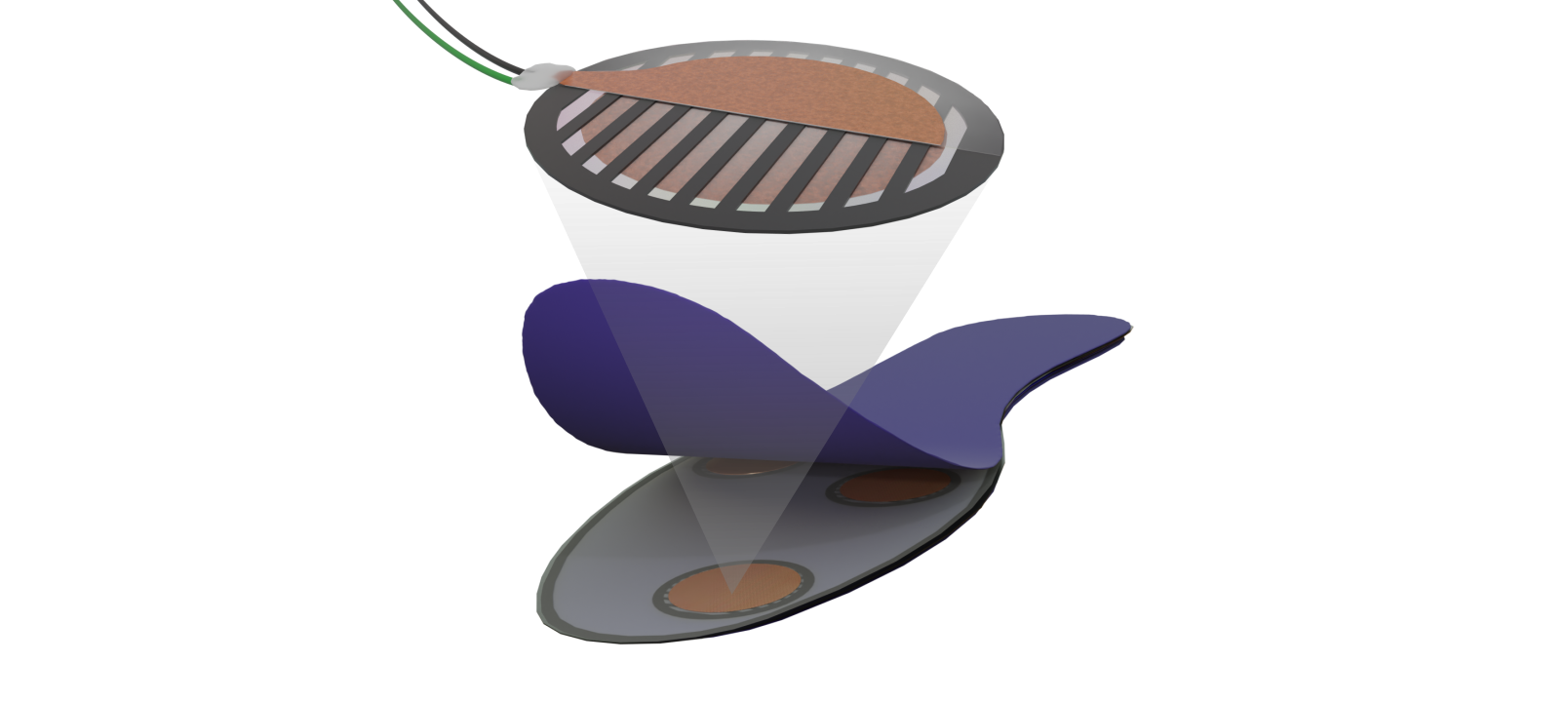
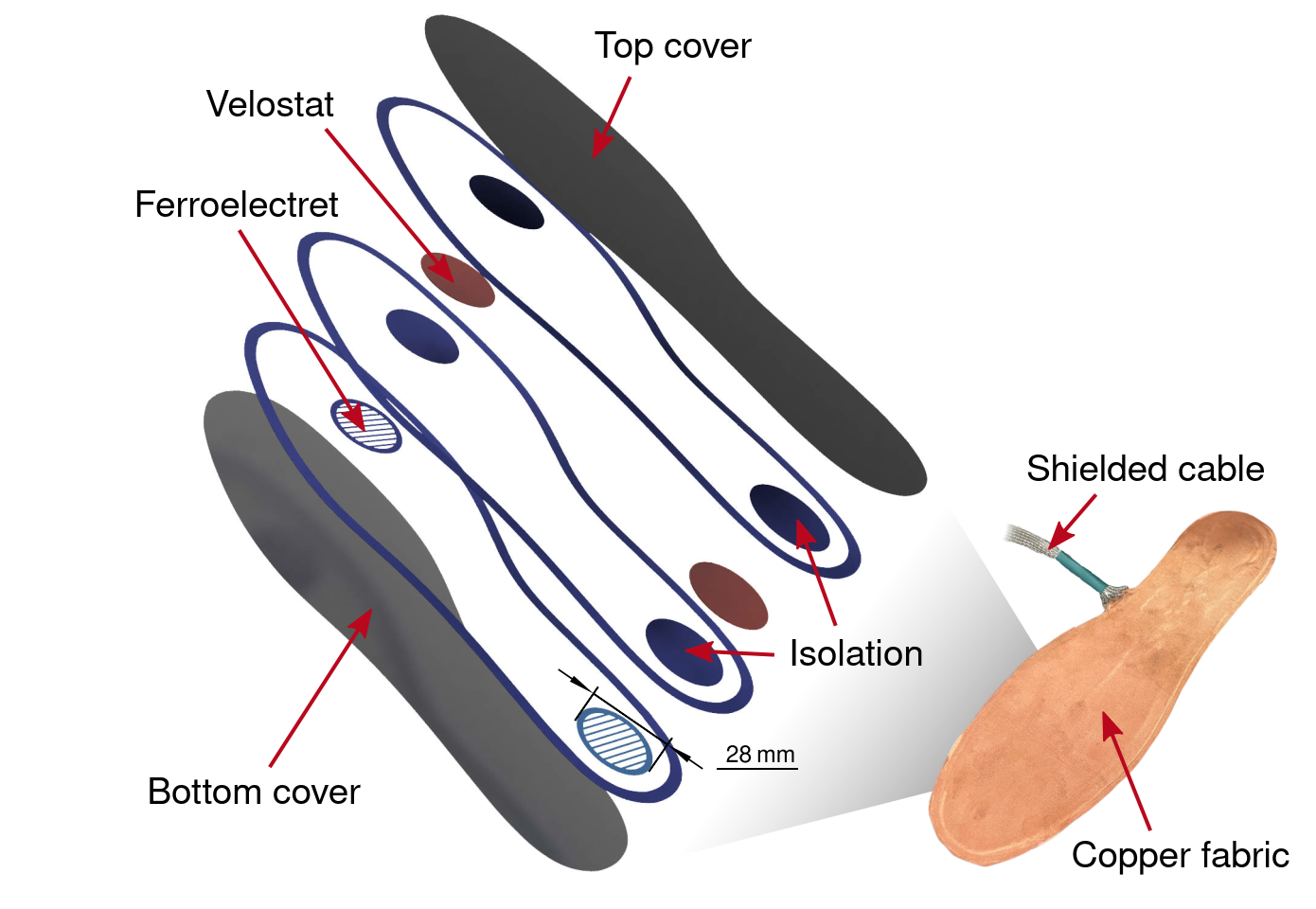
Sensorintegrierte Einlegesohle
Unsere 3D-gedruckten Einlegesohlen mit Ferroelektret-Sensoren revolutionieren die Gang-Erkennung für tragbare Robotik. Leicht, kostengünstig und präzise erfassen sie die markanten Gangereignisse wie Fersenauftritt mit minimaler Verzögerung und ermöglichen eine nahtlose Biomechanik-Analyse sowie die Steuerung von Exoskeletten. Entwickelt zur Unterstützung natürlicher Bewegungen ohne labortechnische Einschränkungen, ebnen sie den Weg für neue Fortschritte in der Rehabilitation und Assistenzrobotik. Weitere Informationen dazu in der zugehörigen Veröffentlichung.
Vibrotaktiles Feedback
Vibrotaktiles Feedback kann gut zur Ergänzung oder als Ersatz für visuelle Reize verwendet werden. Durch eine geeignete Anordnung der Vibrationsaktorik können dem Menschen bspw. auch Richtungsinformationen dargestellt werden. Im Rahmen einer Kooperation eröffnet ein solches Interface einen Informationskanal, über den der Roboter dem Menschen intuitiv verständliche Signale zukommen lassen kann.
Prototyp des vibrotaktilen Armbands zur Erzeugung von Feedback.
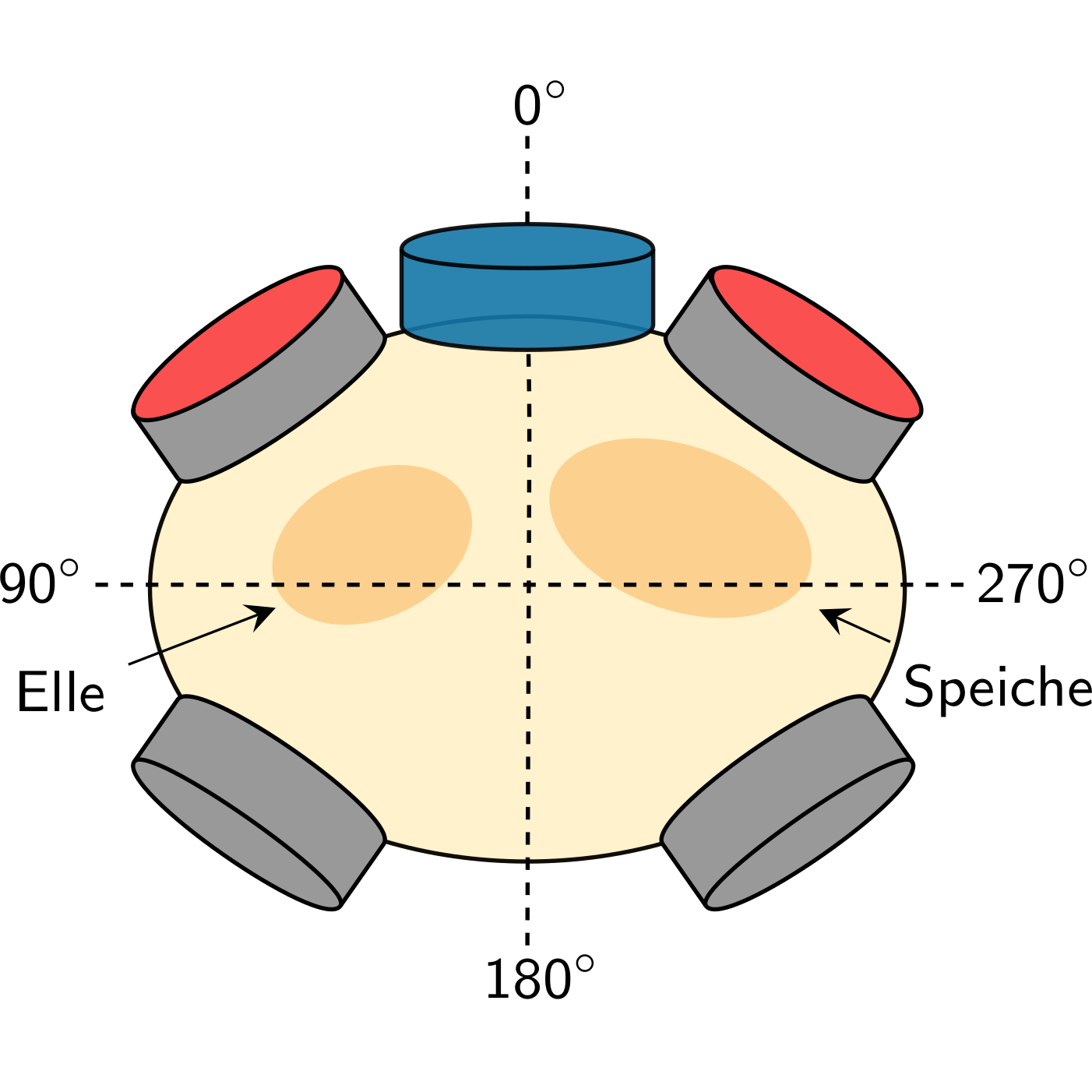
Die vibrotaktile Illusion (blau) wird durch zwei aktive Aktoren (rot) erzeugt und ermöglicht einen erweiterten Arbeitsbereich, bei einer begrenzten Anzahl an Aktoren (grau).
Das hier dargestellte Armband verwendet so genannte vibrotaktile Illusionen, um mit nur vier Aktoren Vibrationen um den gesamten Armumfang zu erzeugen. Weitere Informationen dazu in der zugehörigen Veröffentlichung.

3D-Eingabe mit haptischem Feedback an den Nutzer
Der omega.7 von force dimension lässt sich wie eine 3D-Maus bedienen mit dem Zusatz einer frei programmierbaren haptischen Rückgabe an den Nutzer. Dabei sind u.a. komplexe Impedanzverhalten abbildbar.
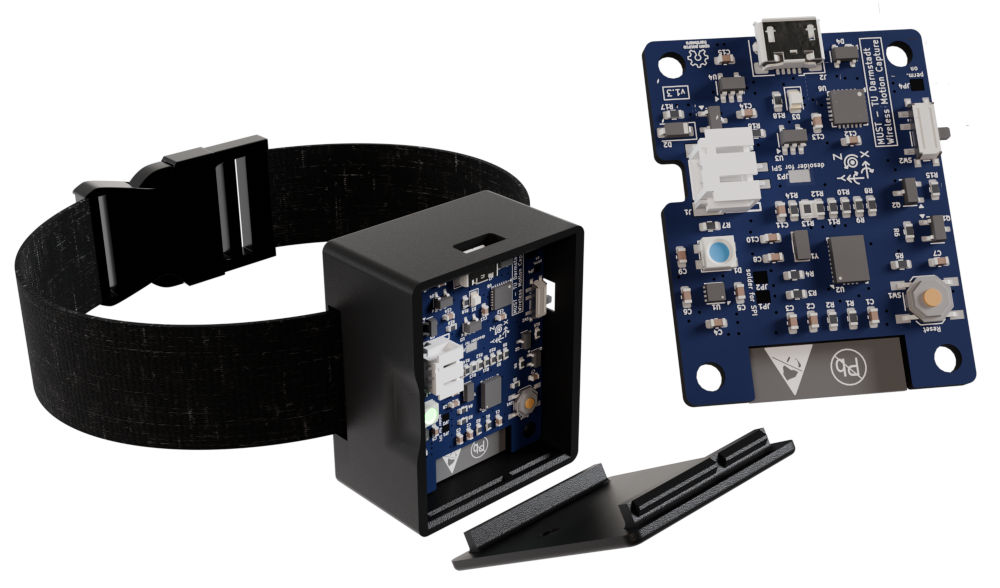
Drahtloses Bewegungserfassungssystem
Inertiale Bewegungserfassung liefert wertvolle Daten in Bereichen wie Biomechanik, Robotik und Mensch-Computer-Interaktion. Unser tragbares Bewegungserfassungssystem kombiniert Open-Source-Hardware mit einem modularen Software-Framework, das Kompatibilität mit den biomechanischen Software-Tools OpenSim und OpenSense bietet. Das System verfügt über einen Algorithmus zur automatischen Kalibrierung basierend auf arbiträren Bewegungen, wodurch Plug-and-Play-Funktionalität erreicht werden kann. Weitere technische Details und Ergebnisse sind in der zugehörigen Veröffentlichung zu finden.

Roboter aus dem Drucker
In seiner Bachelorarbeit konstruierte Felix Herbst diesen Prototypen eines 3D-gedruckten Sechs-Achs-Roboters, der mittlerweile in dritter Generation vielfach repliziert wurde. Ausführliche Informationen zum Hintergrund im Artikel von Mareike Hochschild.
-
![]()
Studentische Projekte wie dieses zählen zum Alltag am Fachgebiet. -
![]()
3D-gedruckter Roboter in der Mensch-Maschine-Interaktion. -
![]()
Mittels Greifer können ferngesteuert Objekte unterschiedlichster Art manipuliert werden. -
![]()
Additive Fertigung hat die Prototypen-Entwicklung auch bei uns am Fachgebiet revolutioniert.




- Gehe zu Bild 1
- Gehe zu Bild 2
- Gehe zu Bild 3
- Gehe zu Bild 4
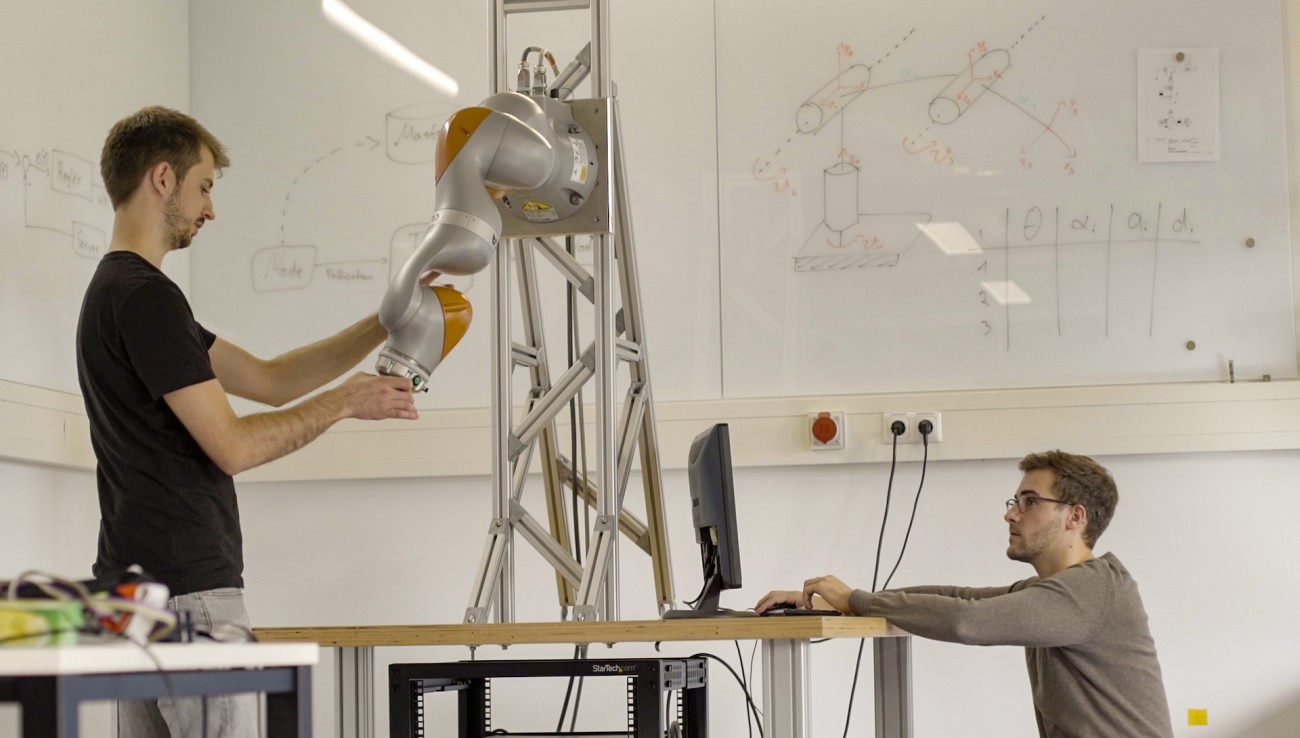
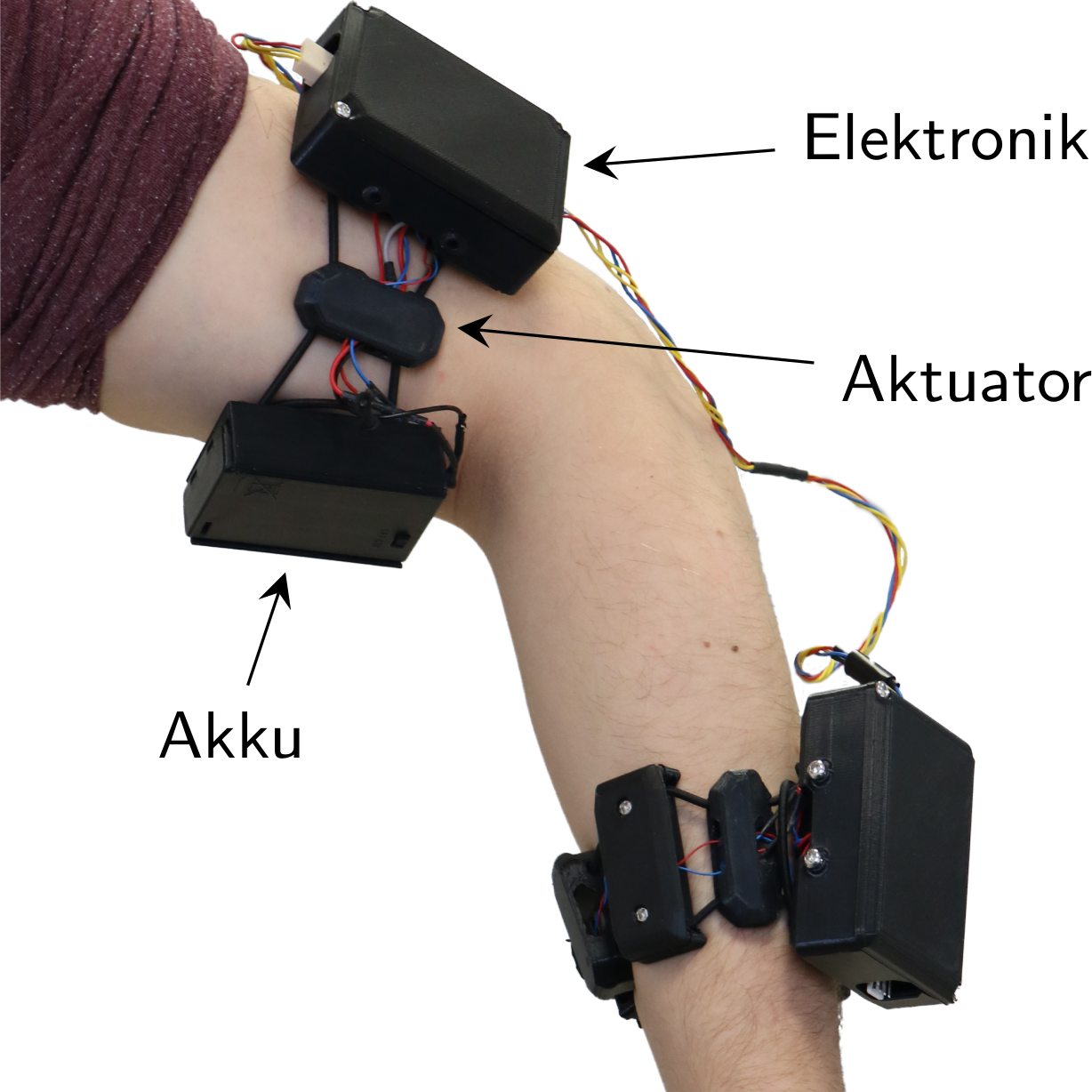
Exoskelett
Exoskelette sind tragbare robotische Systeme, die den Menschen hinsichtlich Leistung und Zielsicherheit unterstützen können. Ein robotisches System am menschlichen Arm kann bspw. die Kraft und Genauigkeit sowohl eines gesunden als auch eines körperlich eingeschränkten Menschen verbessern. Die Vorteile aus beiden Welten vereint, lassen sich intelligente Mensch-Maschine-Systeme entwickeln zur Leistungsunterstützung, der Rehabilitation, der Teleoperation oder zur haptischen Interaktion in Szenarien der Virtual Reality.
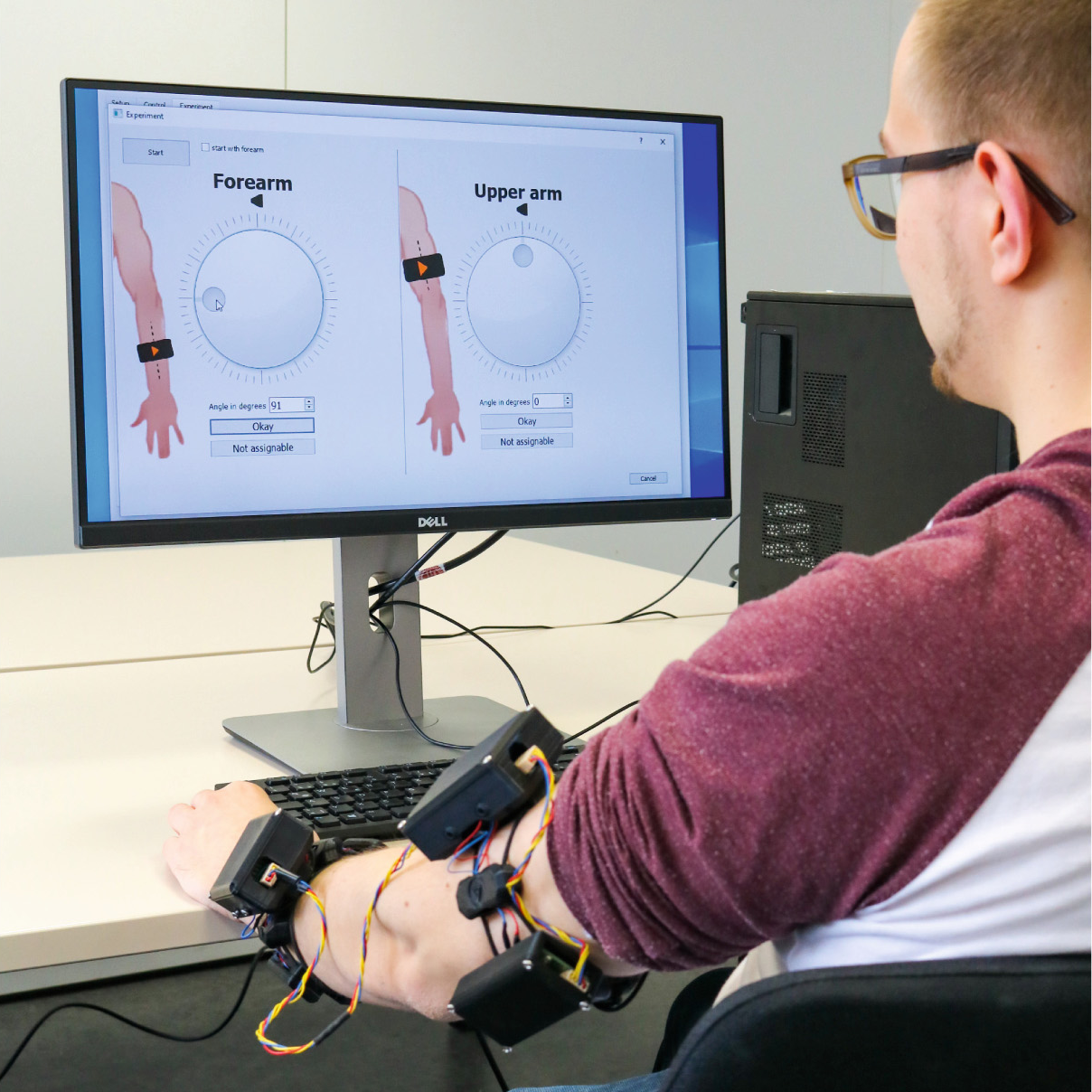
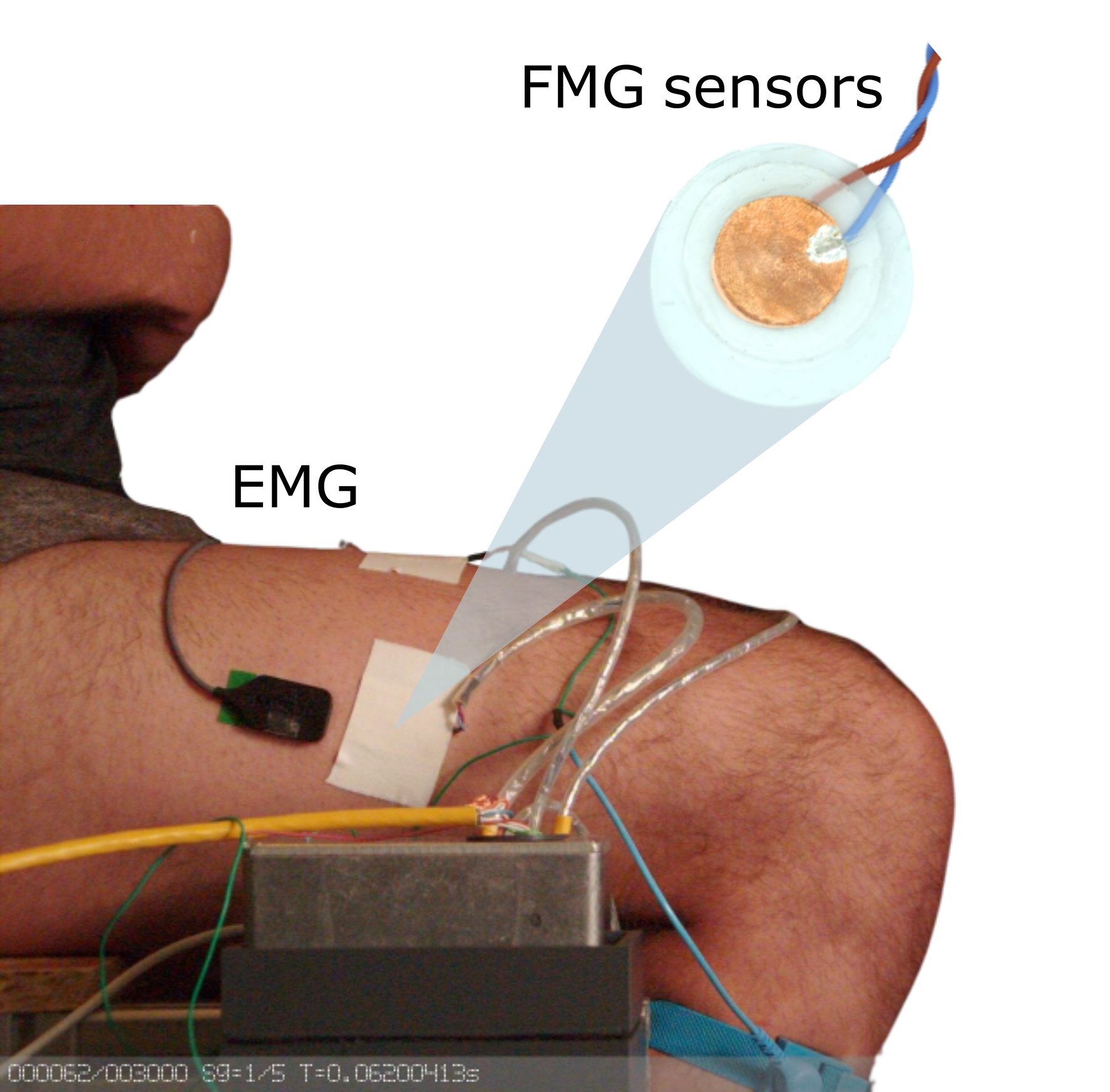
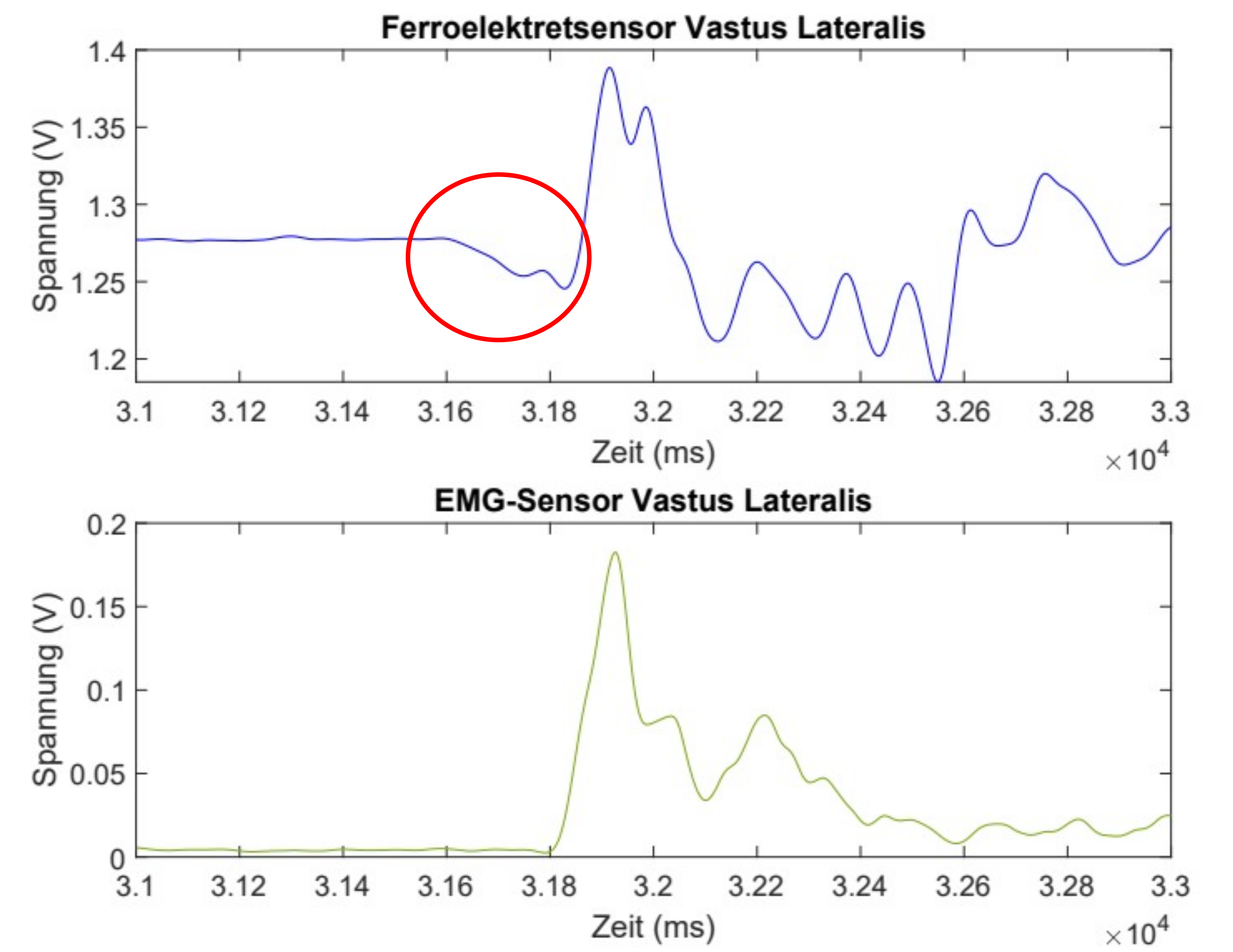
Bewegungsintentionserkennung
Für eine intuitive und nahtlose Interaktion zwischen Mensch und Maschine beim Einsatz von Exoskeletten oder aktiven Prothesen ist der Einsatz geeigneter Sensorsysteme für eine effektive Bewegungsunterstützung unerlässlich. Gerade für den alltäglichen Gebrauch müssen die Sensoren möglichst wenig einschränken. In unserer Forschung entwickeln wir eigenständig Kraftsensoren auf Basis von Ferroelektreten, um die Verformung einzelner Muskeln zu erfassen und so auf die Intention des Nutzers zu schließen. Diese Sensoren setzen wir in alltäglichen Sensoren wie der Aufstehbewegung ein, die für eingeschränkte Personen eine besonders hohe Belastung darstellt. Mit Hilfe dieser Systeme arbeiten wir daran, Menschen mit Bewegungseinschränkungen ein Stück Lebensqualität im Alltag zurückzugeben. Details und Ergebnisse sind in der zugehörigen Veröffentlichung zu finden.
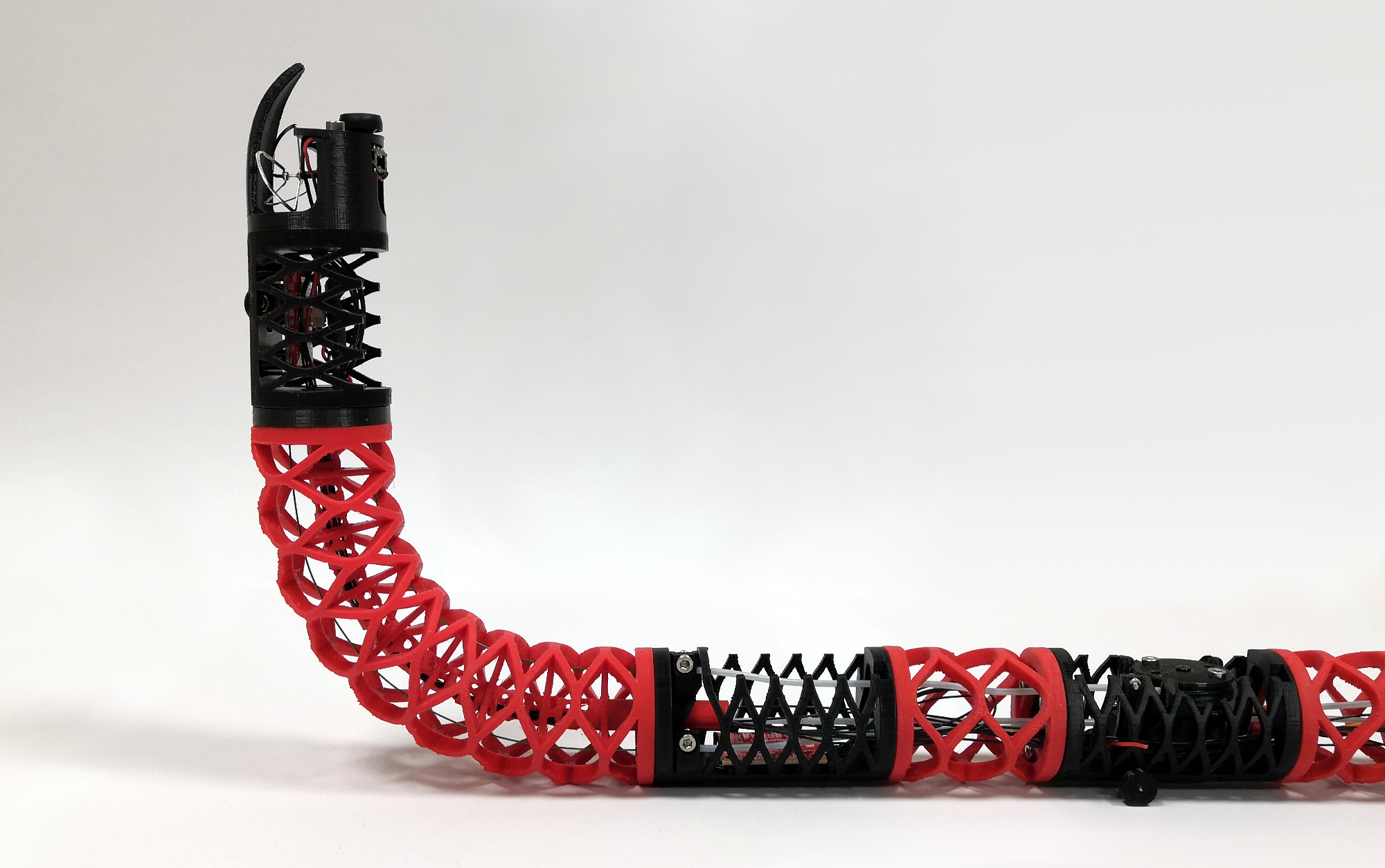
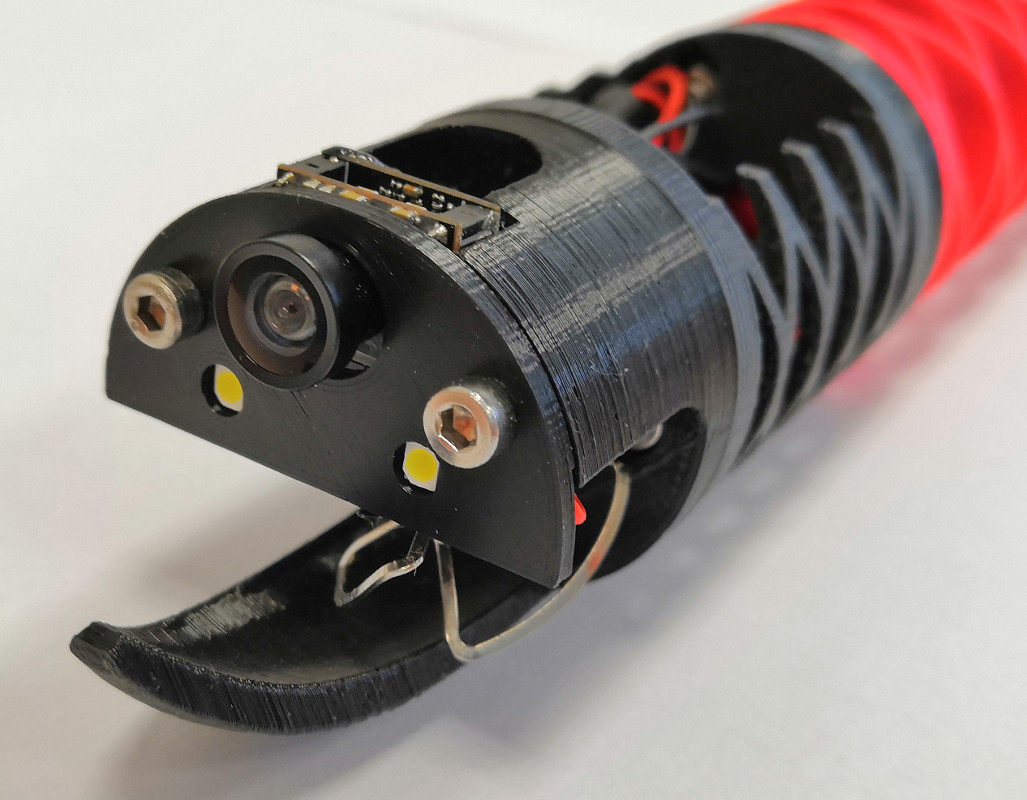
Kontinuumsroboter
Im Gegensatz zu Robotern mit konventionellen, diskreten Gelenken zeichnen sich Kontinuumsroboter durch ihre deplatzierten Gelenke aus. Kontinuumsgelenke benötigen keine diskrete Lagerung im klassischen Sinne und lassen sich deshalb hervorragend miniaturisieren. Die Anwendungsbereiche der Kontinuumsroboter sind vielfältig und reichen von der Untersuchung unwegsamer Gebiete über Objektmanipulation bis hin zum invasiven medizintechnischen Einsatz.

Gestenerkennung
Die Erkennung von Handgesten ermöglicht eine intuitive Steuerung von Exoskeletten, tragbaren Geräten und interaktiven Systemen. Unsere Forschung konzentriert sich auf den Einsatz hochsensitiver Ferrolektretsensoren aus biokompatiblen Materialien wie PLA. Diese Sensoren erfassen präzise Bewegungen und lassen sich nahtlos in Textilien wie Sportbandagen integrieren. Ein aufsteckbares Elektronikmodul übernimmt dabei die Verarbeitung der Signale.
Die Sensoren können Gesten wie eine geöffnete oder geschlossene Faust sowie Variationen in deren Ausführung erkennen. Perspektivisch lassen sich diese Technologien nicht nur zur Gestenerkennung, sondern auch zur Aktuation, beispielsweise in Exoskeletten, einsetzen. Sie schaffen so eine komfortable und vielseitige Verbindung zwischen Mensch und Maschine.
Weitere Informationen in der Veröffentlichung (Gestendetektion) und Veröffentlichung (Textilbasierter Sensor).
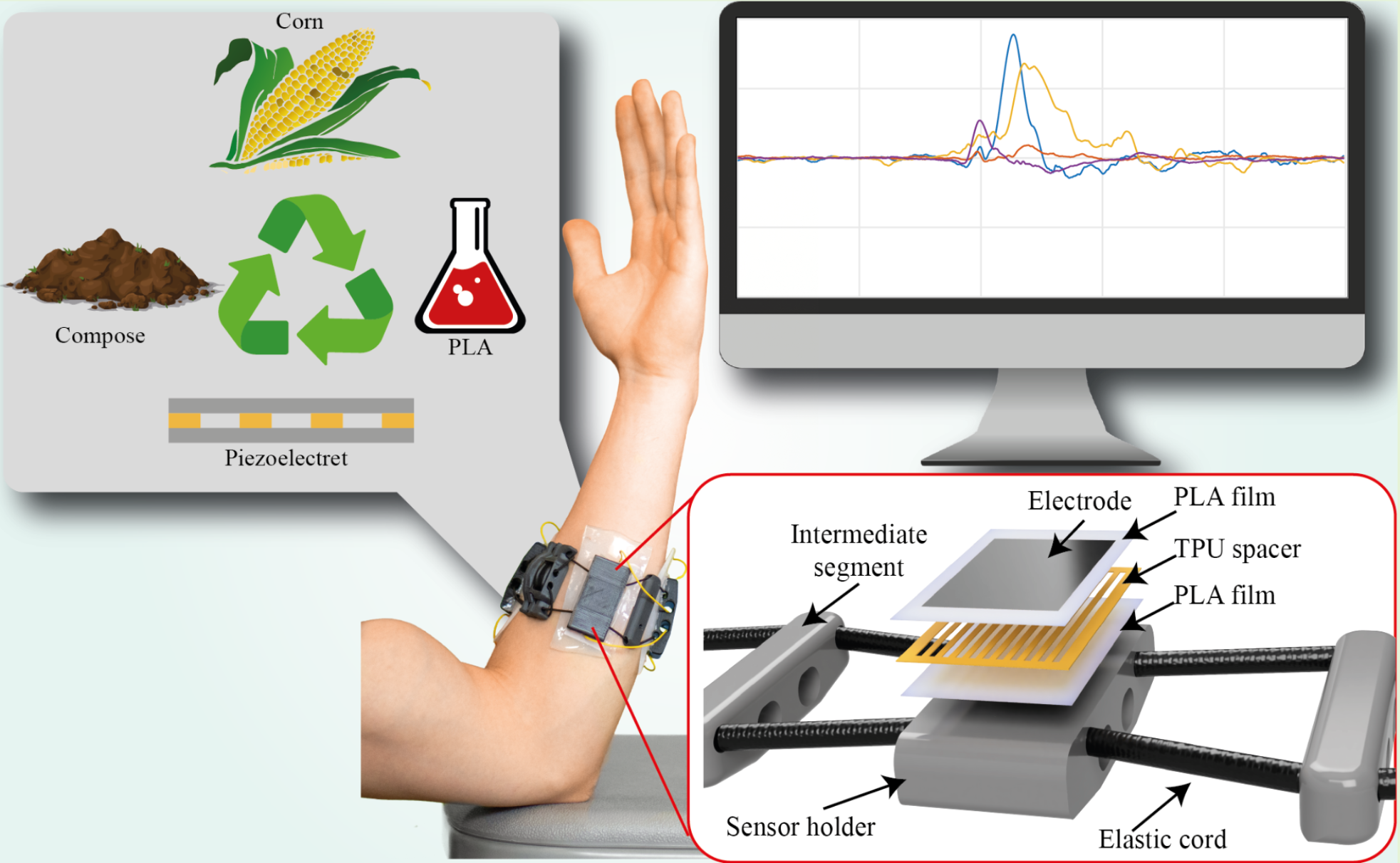
Biokompatibler Ferrolektretsensor aus PLA zur sensitiven Erfassung und Unterscheidung mehrerer Gesten.
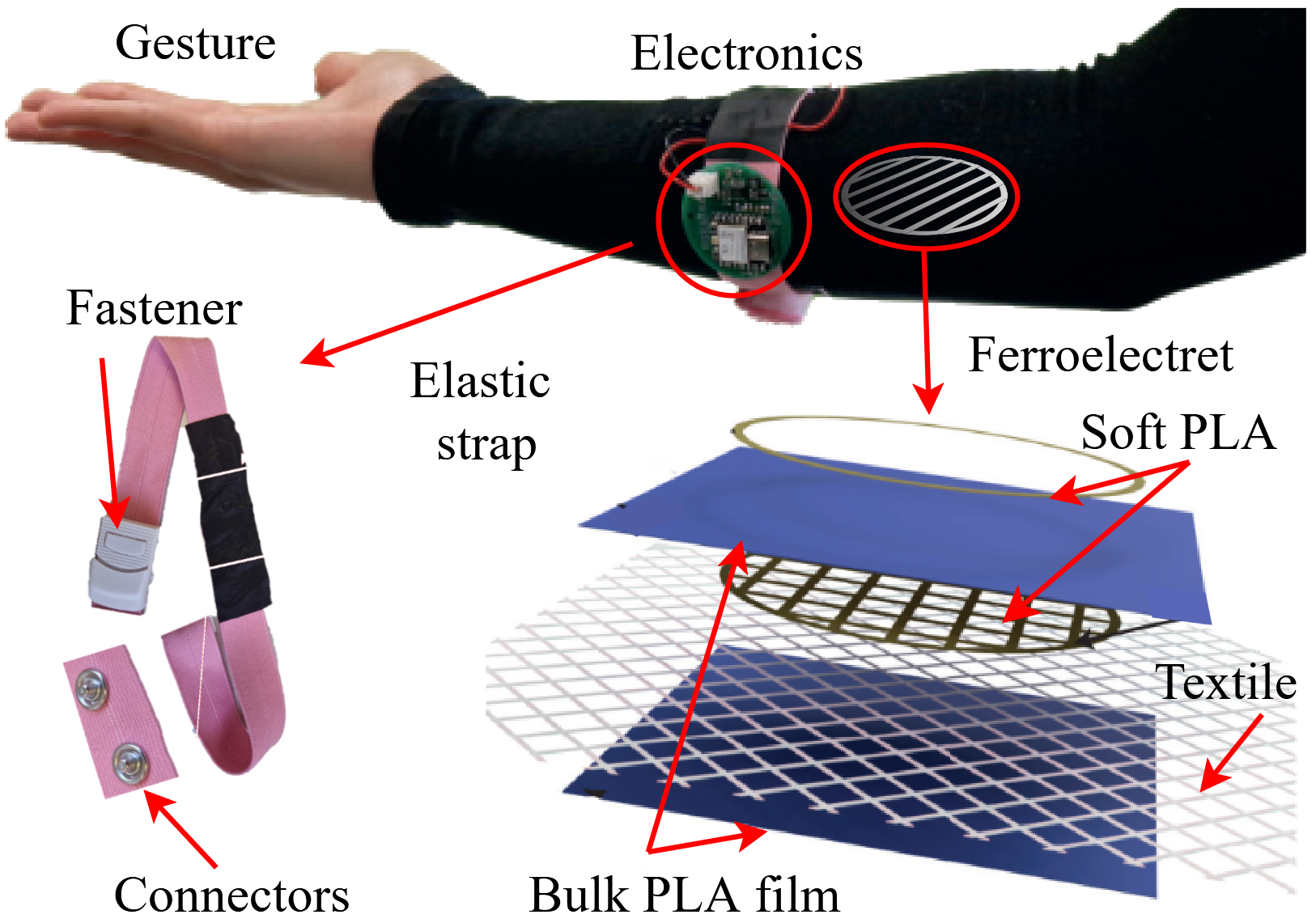
Integration von PLA-basierten Sensoren in eine Sportbandage zur Gestenerkennung. Die Elektronik wird durch ein aufsteckbares Modul an einem elastischen Band ergänzt, das PLA und Textil nahtlos verbindet.
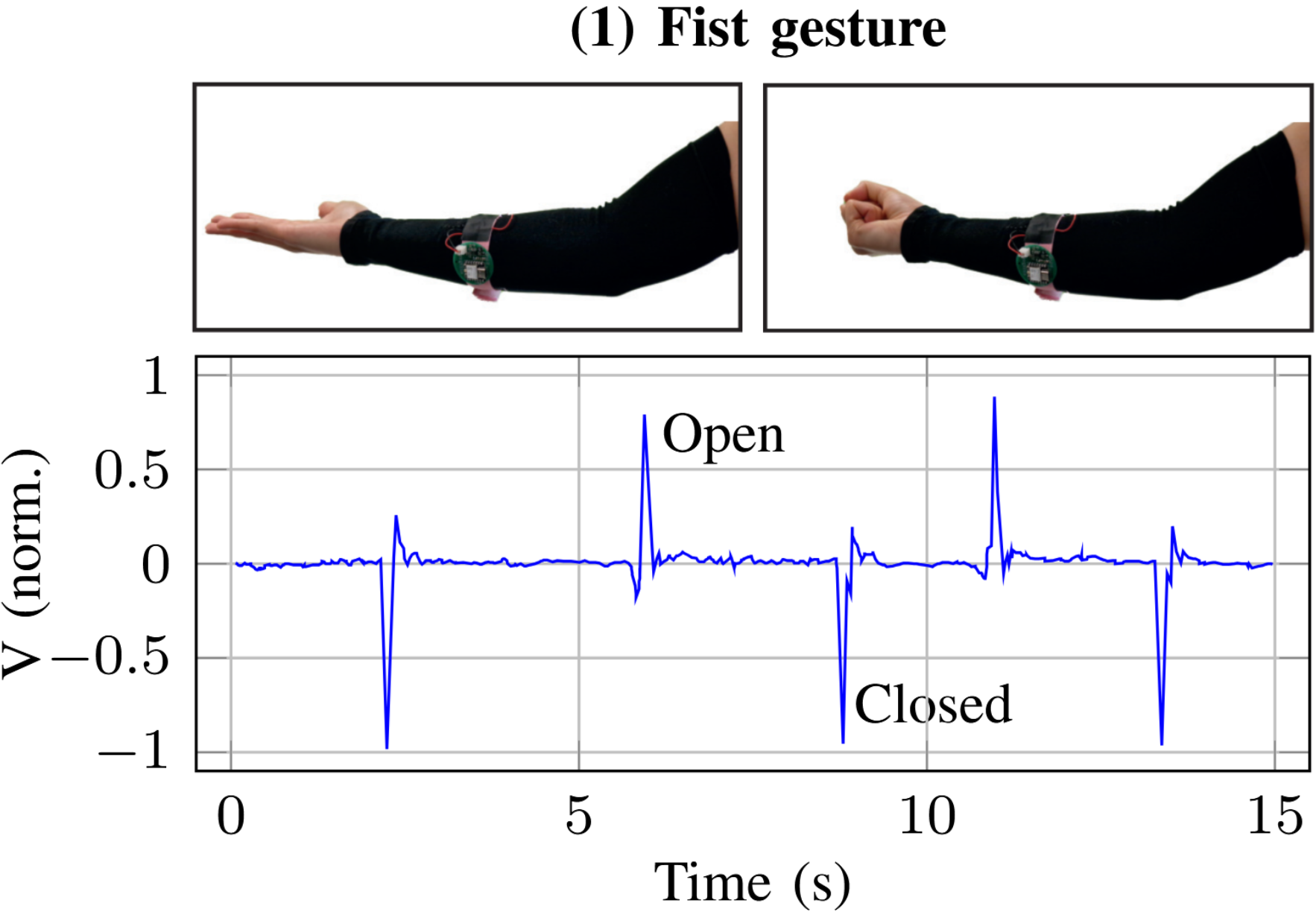
Erkennung von Handgesten wie geöffneter und geschlossener Faust mit signifikanten Signalverläufen, die je nach Geste und deren Ausführung variieren.
