Jedes Jahr werden in Deutschland mehr als 20 Millionen Quadratmeter an Sandwichelementen für den Bausektor produziert, insgesamt sogar 200 Millionen in der Europäischen Union. Es gibt Potenzial für Einsparungen bei Material und Energie durch eine Optimierung der Produktionsprozesse. Um ressourceneffiziente Herstellung von Sandwichelementen zu fördern, hat das Bundesministerium für Wirtschaft und Energie ein neues Forschungsprojekt namens „Ressourceneffiziente Sandwichelemente durch zerstörungsfreies Monitoring für den Leichtbau ReSaMon“ gestartet.
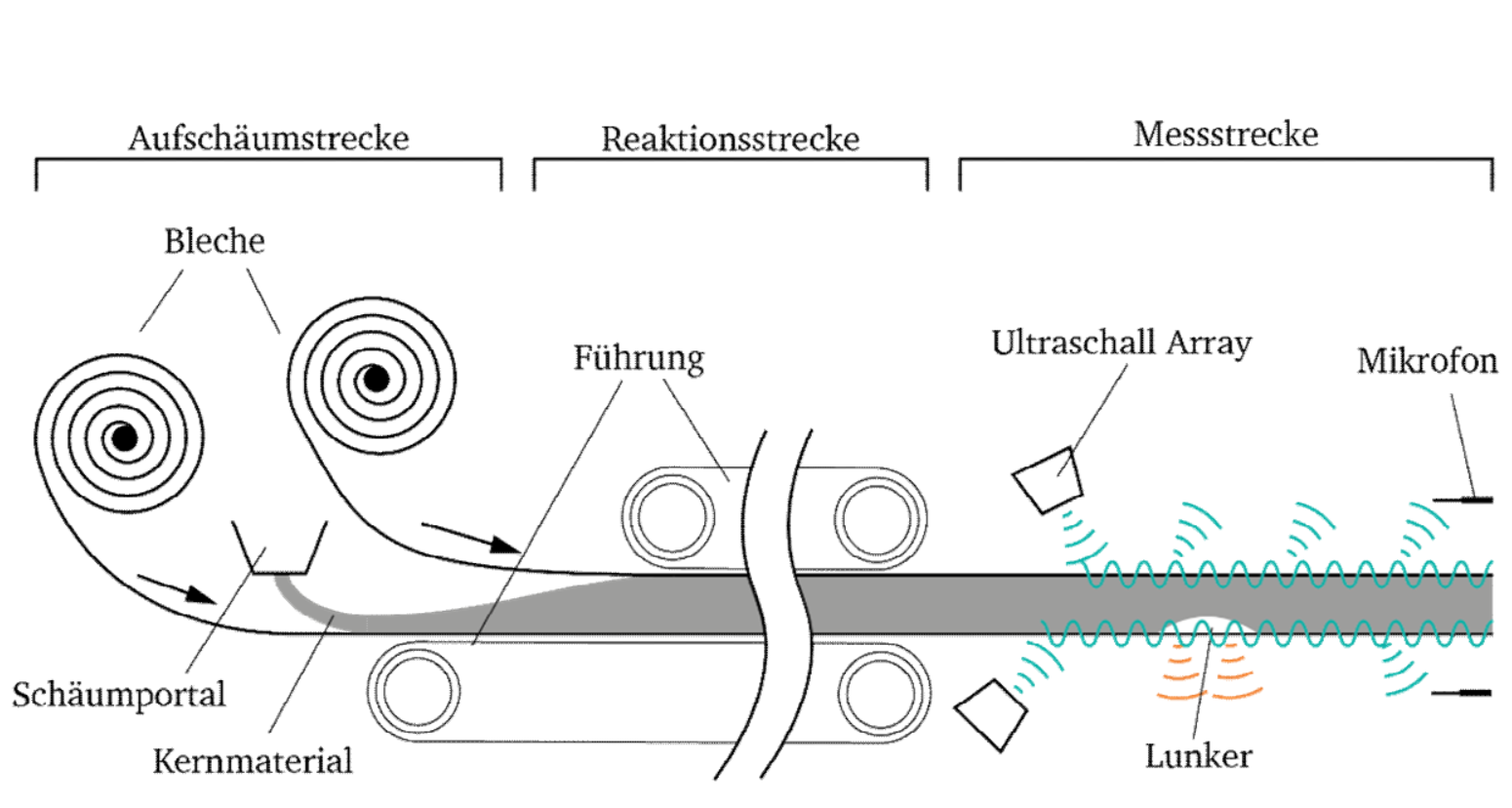
Die Sandwichelemente bestehen aus zwei dünnen metallischen Deckschichten und einem Kern aus Polyurethan-Hartschaum und sind wichtige Bauprodukte. Mögliche Schwachstellen wie Schäden durch wärmeinduzierte Spannungen sind jedoch nicht immer im Herstellungsprozess erkennbar und treten erst während der Verarbeitung am Bau auf. Das führt zu Reklamationen, längeren Bauzeiten und anderen Problemen.
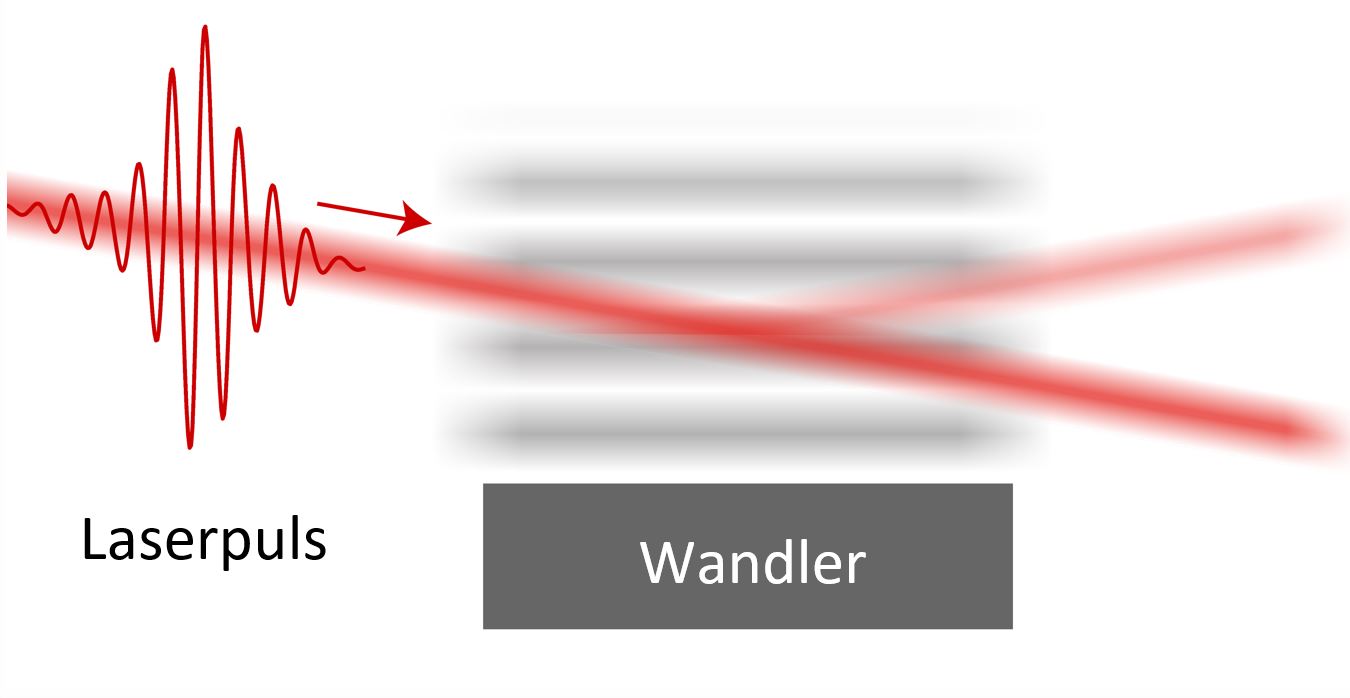
Das Projektteam von „ReSaMon“ wird eine neue zerstörungsfreie Ultraschallmesstechnik entwickeln, die Fehlstellen und Ungenauigkeiten sofort erkennen kann, um mögliche Schwachstellen und Änderungen der Materialeigenschaften im Produktionsprozess zu identifizieren. Die Messtechnik arbeitet berührungslos und beeinträchtigt somit nicht den Produktionsprozess. Die Baubranche und Endverbraucher werden von dieser Technologie profitieren.
Das Projektkonsortium besteht aus Industriepartnern, Sandwichelement-Experten, Messtechnik-Spezialisten und Simulationsexperten, die ihre Expertise zusammenbringen, um ein besseres Verständnis der Einflüsse der Produktion auf die Produkteigenschaften zu erreichen. Zu den Projektpartnern gehören u. a. das Fraunhofer-Institut für Betriebsfestigkeit und Systemzuverlässigkeit LBF, das Institut für Stahlwerktechnik IFSW, das Unternehmen Inoson, Hersteller wie ArcelorMittal und Covestro Deutschland sowie wir, das Fachgebiet Mess- und Sensortechnik (MuST) der TU Darmstadt als Forschungspartner mit Fokus auf Ultraschallmesstechnik.