Modellbildung eines mobilen Roboters
Proseminar, Bachelor thesis
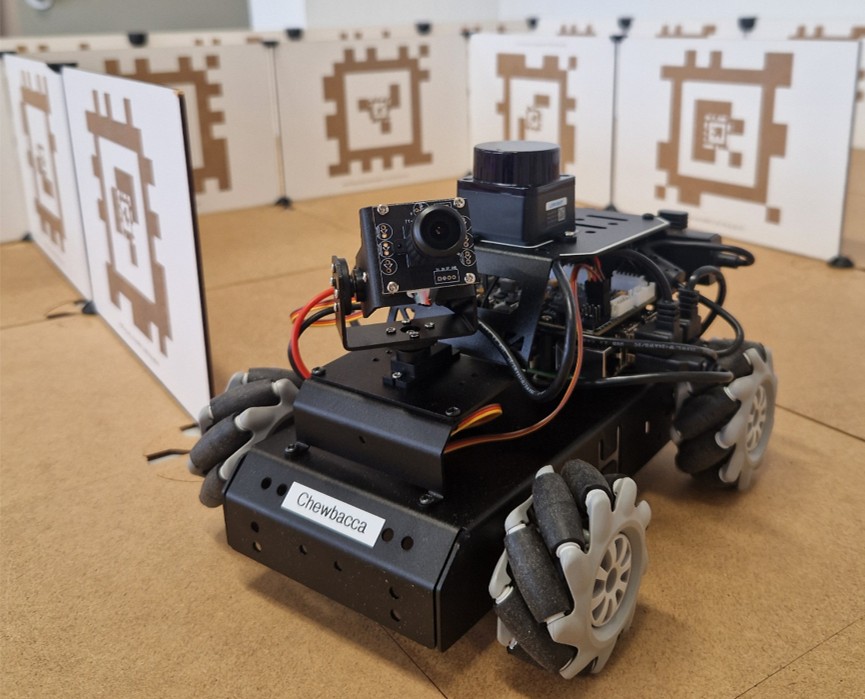
The goal of this work is to develop a dynamic model for a mobile robot of the type “MentorPi,” which is used in the robotics lab of the RIS department. A special feature of the robot is its Mecanum wheels, which allow it to move omnidirectionally (in any direction) – see in this Video.
Weitere Details findest Du in der Ausschreibung.
Further details can be found in the project description (german).