Praktische Implementierung eines Multiagentensystems mit mobilen Robotern
Practical Implementation of a Multi-Agent System with Mobile Robots
Bachelorarbeit
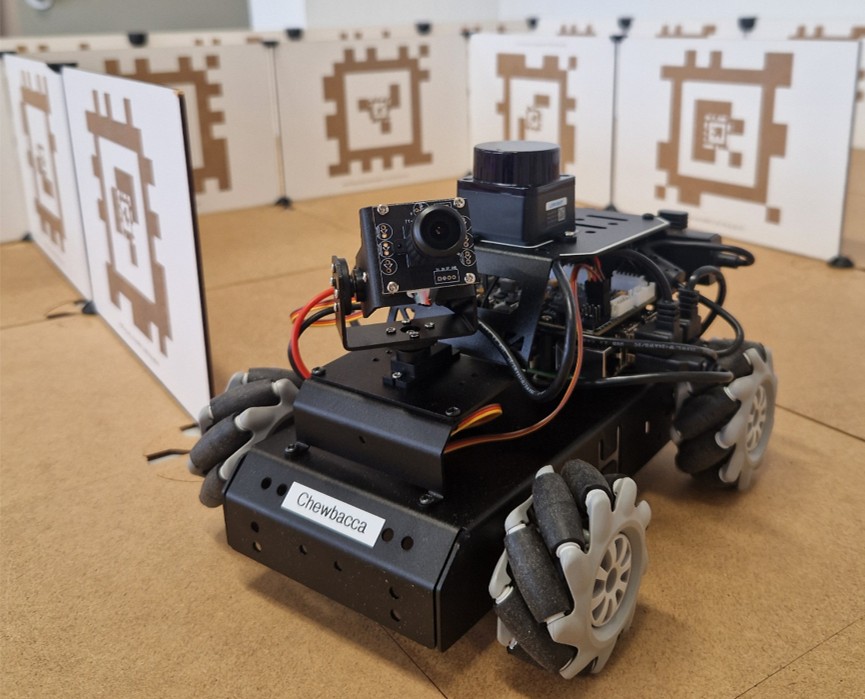
Ziel dieser Arbeit ist der Aufbau und die Realisierung eines praktischen Multiagentensystems mit mobilen Robotern. Hierfür stehen im Roboterlabor des Fachgebiets ris mehrere mobile Roboter vom Typ MentorPi zur Verfügung (siehe Bild rechts). Eine Besonderheit des Roboters sind die Mecanum-Räder, die es ihm ermöglichen, sich omnidirektional (in jede Richtung) zu bewegen.
Alle weiteren Details befinden sich in der Ausschreibung als PDF.