Modellbildung eines mobilen Roboters
Proseminar, Bachelorarbeit
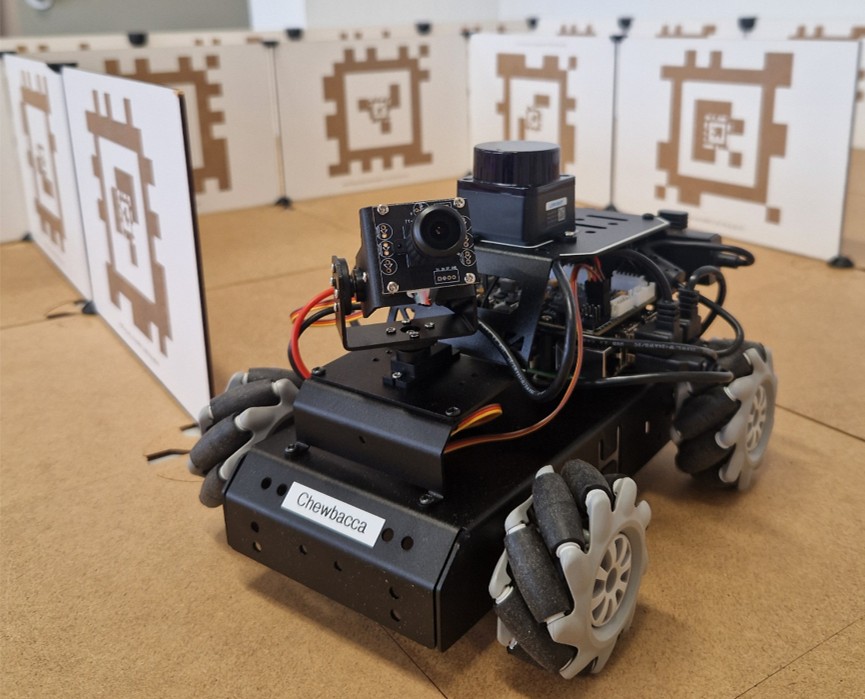
Ziel dieser Arbeit es, ein dynamisches Modell für einen mobilen Roboter vom Typ „MentorPi“ zu erstellen, der im Roboterlabor des Fachgebiets ris genutzt wird. Eine Besonderheit des Roboters sind die Mecanum-Räder, die es dem Roboter ermöglichen, sich omnidirektional (in jede Richtung) zu bewegen (siehe in diesem Video).
Weitere Details findest Du in der Ausschreibung als PDF. (wird in neuem Tab geöffnet)