

Karsten Kreutz M.Sc.
Situationsanalyse im interaktiven Straßenverkehr
Kontakt
karsten_stefan.kreutz@tu-...
work +49 6151 16-25034
Work
S3|10 405
Landgraf-Georg Straße 4
64283
Darmstadt
„Situationsanalyse (bzw. Situationsklassifikation) im interaktiven Straßenverkehr“.
-Interaktiver Straßenverkehr bedeutet, dass die verschieden Verkehrsteilnehmer sich gegenseitig berücksichtigen, also interagieren.
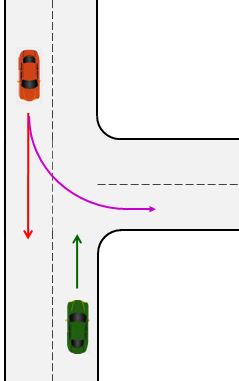
- Begriff der Situation: Verkehrsteilnehmer haben häufig verschiedene Handlungsmöglichkeiten, z.B. kann ein Auto, welches uns an einer Kreuzung entgegenkommt, entweder geradeaus fahren oder links oder rechts abbiegen. Beim links abbiegen kreuzt er unsere Spur, es tritt als eine Interaktion auf. Dieses Kreuzen unserer Spur kann er vor uns, hinter uns oder als Crash durchführen. Somit ergeben sich für dieses einfache Szenario n=5 verschiedene mögliche (Zukunfts-) Situation (geradeaus, rechts, links vor uns, links Crash & links nach uns).
-Situationsanalyse bezeichnet nun die Klassifikation, also die Abschätzung, welche dieser Situationen nun mit welcher Wahrscheinlichkeit auftreten werden (also die Abschätzung wie der andere Verkehrsteilnehmer sich verhalten wird). Auf diesem Gebiet gibt es verschiedene Ansätze.
Themenvorschlag 1:
Fahrzeug-Trajektorien-Prädiktion per Parameteroptimierung:
Für die sicher Verhaltensplanung eines autonomen Fahrzeugs ist es von essentieller Bedeutung, nicht nur auf die aktuelle Situation zu reagieren, sondern vielmehr vorausschauend zu planen. Damit dies möglich ist, wird versucht die zukünftige Trajektorien der anderen Verkehrsteilnehmer möglichst gut vorherzusagen. Die Qualität dieser Trajektorien-Prädiktion ist also ein fundamentaler Bestandteil des autonomen Fahrens.
Ein sehr einfaches Model zur Fahrzeugbeschreibung auf der Autobahn liefert das Intelligent Driver Model (IDM) und somit ist es prinzipiell zur rechen-sparsamen Prädiktion geeignet. Die zugehörigen Modelparameter sollen hierzu (in Echtzeit) optimiert werden (z.B. mit einem Partikelfilter), sodass sich eine optimale Prädiktionsgüte ergibt.
Themenvorschlag 2:Multi-Model Filter vs. Trajektorien-Klassifizierer:
Diese Situationsklassifikation kann zum einen durch die Verwendung der eigentlich für Tracking entwickelten Multiple-Model-Filter geschehen, kann aber auch durch die Bestimmung von Trajektorienähnlichkeit erfolgen. Diese beiden Verfahren sollen anhand eines einfachen Szenarios, und der Verwendung von realen Trajektoriendaten, miteinander verglichen werden um Vor- bzw. Nachteile des jeweiligen Ansatzes herauszuarbeiten. Im Anschluss (sofern die Zeit es zulässt) könnte, basierend auf den bisherigen Erkenntnisen, einer der beiden Ansätze vom Studierenden modifiziert werden. Im besten Fall sollte dieser dann bessere Ergebnisse liefern als die „Standard“-Werkzeuge.
Themenvorschlag 2b: Multi-Model Filter vs. Trajektorien-Tracker:
Für die präzisse Regelung von Fahrzeugtrajektorien sowie von Flugbahnen im Luftverkehr muss die aktuelle Position des Objekts möglichst genau bestimmbar sein. Dieser Vorgang wird Tracking genannt.
Traditionell wird dies z.B. mit einem aus Kalman-Filtern bestehenden Multi-Model Filter erledigt. Dieser liefert genaue Tracking Ergebnisse, benötigt aber auch extrem viel Rechnenleistung.
Im Rahmen dieser Arbeit sollen daher untersucht werden, inwiefern sich die rechensparsamen Ansätze der Trajektorienähnlichkeit für Tracking eignen.
An dieser Stelle kann dieser Ansatz vom Student selbst modifiziert werden, um die Genauigkeit zu erhöhen.
Die Evaluierung erfolgt an echten Datensätzen aus dem Straßenverkehr.
Alle Themen sind Vorschläge und können auch an die Ideen des Studierenden angepasst werden.