

Ole Hans M.Sc.
Sicherheitsmanagement für ferngesteuertes Fahren
Kontakt
ole.hans@vay.io
Work
Mariendorfer Damm 1
12099
Berlin

Forschungskontext
Das autonome Fahren und automatisierten Fahrsysteme (ADS) haben das Potenzial, die Mobilität im Stadtverkehr zu revolutionieren und die Verkehrssicherheit zu erhöhen, allerdings ist der derzeitige technologische Fortschritt noch nicht ausgereift, so dass automatisiertes Fahren nur mit Einschränkungen möglich (z.B. durch Beschränkung der Geschwindigkeit oder der strickten Definition des Betriebsbereiches, der sognannten Operational Design Domain (ODD)).
Insbesondere wenn ein autonomes Fahrzeug die Grenzen der definierten Operational Design Domain (ODD) erreicht, ist es möglicherweise nicht in der Lage, die Fahrsituation autonom zu interpretieren und alle unklaren Verkehrssituationen aufzulösen.
Für solche Szenarien wurden die verschiedenen Konzepte der Fernsteuerung als Ausweichlösung entwickelt, welches dazu beitragen kann, die aktuellen Probleme von autonomen Fahrzeugen zu lösen.
Das aus der Robotik stammende Konzept des „Remote Drivings“ ist ein Fernsteuerungskonzept für Fahrzeugen, welche die vollständige Fernsteuerung eines Fahrzeugs durch einen „Remote Driver“ beinhaltet, der eine drahtlose Verbindung nutzt, um über visuelle Eingaben auf die Umgebung des Fahrzeugs Umgebung des Fahrzeugs zugreifen und Befehle zur Steuerung des Fahrzeugs erteilen kann.
Da diese Technologie eine Reihe von Vorteilen, aber auch technische Einschränkungen gegenüber dem konventionellen Fahren hat, wie z. B. Latenzzeiten, eingeschränkte Sicht oder Videoqualität, ist es notwendig, diese Einschränkungen zu kompensieren.
Für die Einführung der neuen Technologie in den bestehenden Stadtverkehr ist es wichtig, die damit verbundenen Risiken angemessen zu reduzieren und die ausgehenden Gefahren zu analysieren.
Inhalt der Forschung
- Betrachtung des Menschen als Teil des Regelungssystems eines Remote Driving Systems (RDS)
- Entwicklung von Konzepten zur Definition von Operational Design Domains (ODD) und relevanten Fahrszenarien eines Remote Driving Systems (RDS)
- Gefährdungs- und Risikoanalyse von Remote Driving Systemen (RDS)
- Entwicklung von HMI-Konzepten basierend auf der Situational Awareness des Remote Drivers
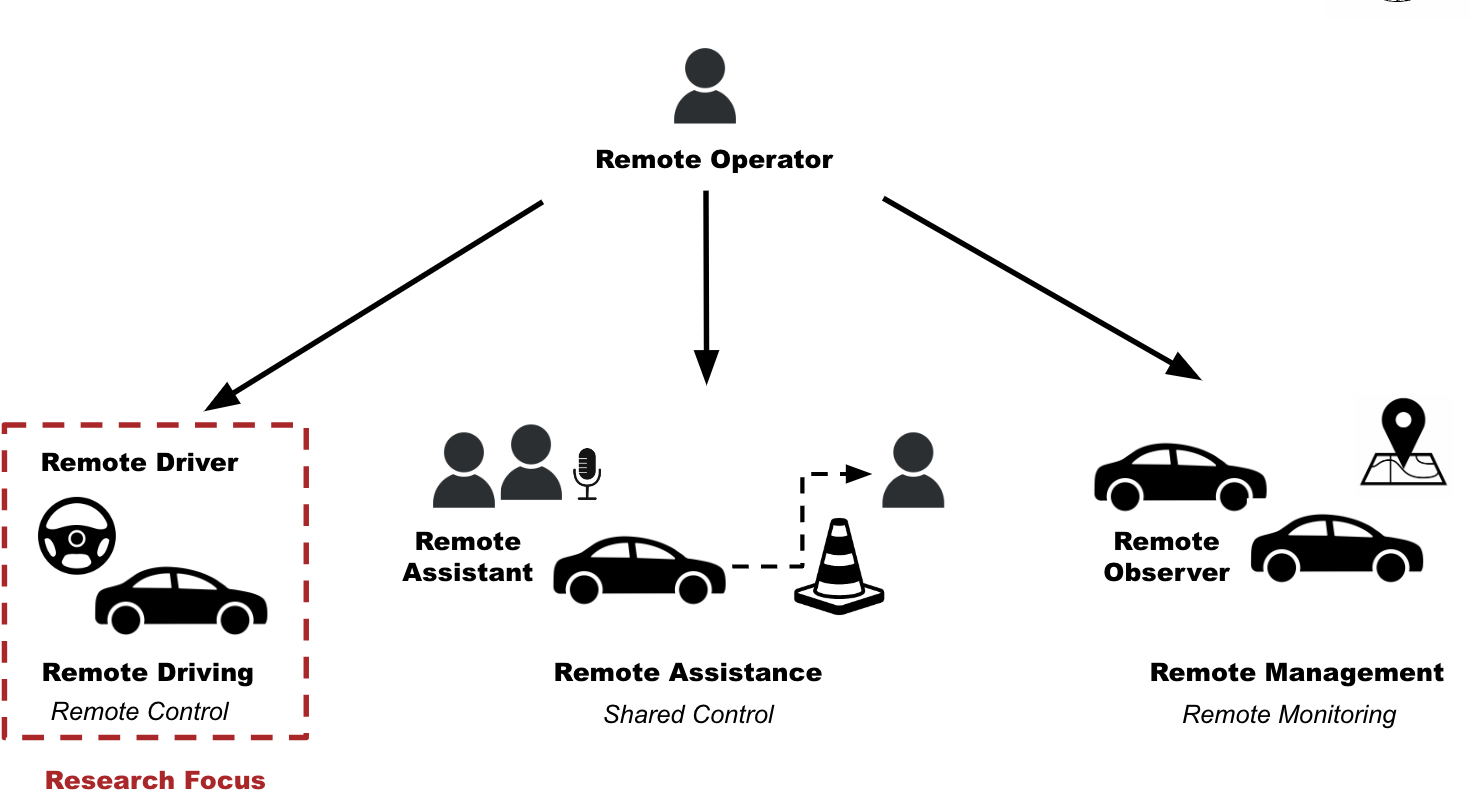
Konzepte der Remote Operation
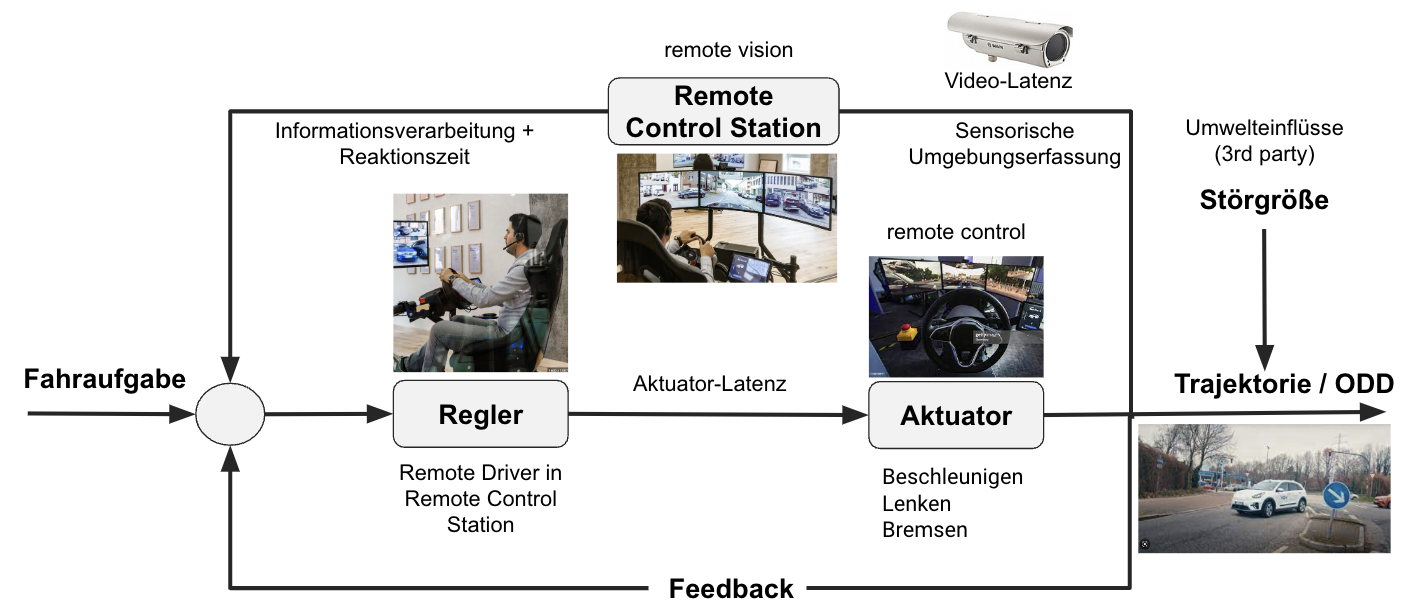
Vereinfachter Regelkreis eines Remote Driving Systems (RDS)