
Verkoppelte Regelung eines Helikopters
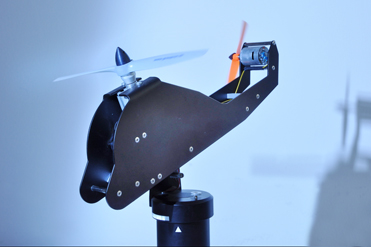
Dieser Praktikumsversuch untersucht die Modellbildung und Regelung eines Hubschraubers. Das vorliegende Hubschraubermodell ist um die Gier- und Nickachse drehbar gelagert und hat somit im Gegensatz zu einem echten Helikopter anstatt 6 lediglich 2 Freiheitsgrade. Ziel dieses Versuchs ist es, eine Lageregelung zu entwerfen, die den Helikopter um beide Achsen stabilisiert und Störungen gut ausregelt.
Das Hubschraubermodell ist nichtlinear. Daher soll es in einem ersten Schritt um einen Arbeitspunkt linearisiert werden. Dies führt zu einem linearen Mehrgrößensystem mit zwei Ein- und zwei Ausgängen. Die beiden Achsen des Hubschraubers sind dabei miteinander verkoppelt, das heißt, Eingriffe in die Nickachse beeinflussen die Gierachse und umgekehrt. Im Rahmen des Praktikums sollen Regler entworfen werden, die beide Achsen möglichst gut voneinander entkoppeln.
Nichtlineare Mehrgrößenregelung eines Flugzeuges
Die Steuerung eines Flugzeugs ist keine einfache Aufgabe. Der Pilot muss die Fluglage um alle drei Achsen stabilisieren, einer vorgegebenen Flugbahn folgen, mit schwierigen atmosphärischen Bedingungen zurecht kommen und ggfs. auf besondere Vorkommnisse reagieren. Dabei stößt der Mensch schnell an seine Grenzen bezüglich der Belastbarkeit, Reaktion und der „Messung“ von Größen der Flugzeugbewegung. Aus diesem Grund haben Autopiloten immer mehr Regelungsaufgaben übernommen um den Piloten zu entlasten und ihn für wichtige Aufgaben wie der Luftraumüberwachung freizustellen.
Ziel dieses Praktikumversuchs ist es, am Beispiel eines Flugzeugmodells Möglichkeiten aufzuzeigen wie ein komplexes nichtlineares Mehrgrößensystemdurch eine Kombination aus linearen und nichtlinearen Verfahren robust geregelt werden kann. Darüber hinaus wird ein Einblick in die Funktionen eines Flugzeugautopiloten gegeben und verdeutlicht, welche regelungstechnischen Herausforderungen sich für dieses automatisierungstechnische System ergeben.
Nichtlineare Regelung eines Gyroskops
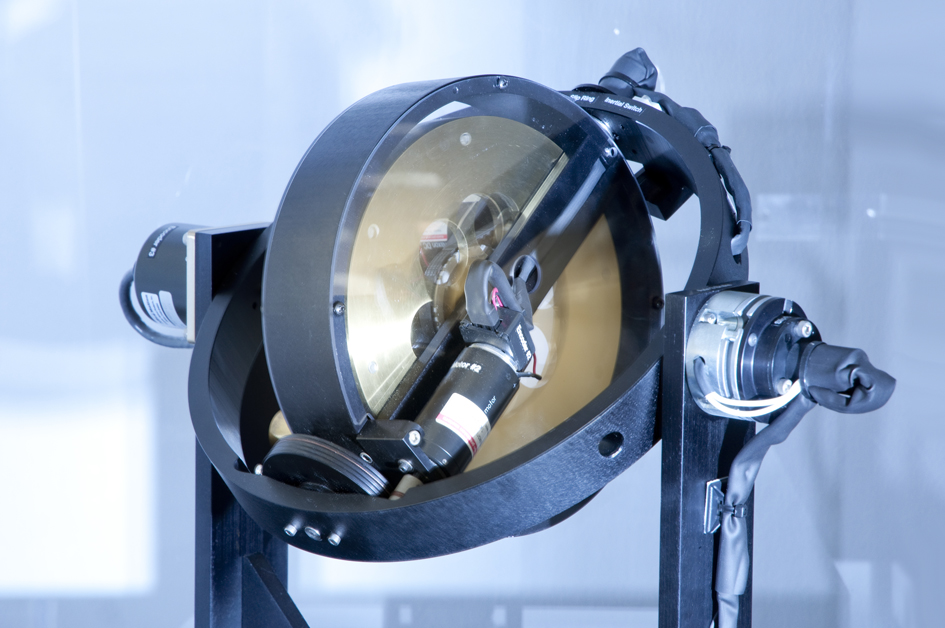
Ein Gyroskop ist ein Kreisel, dessen Drehachse wiederum beweglich gelagert ist. Gyroskope haben vielfältige Einsatzmöglichkeiten in der Messtechnik, z.B. in der Navigation zur Messung von Orientierungs- und Richtungsänderungen. Sie werden aber auch als Aktor eingesetzt, so wird etwa die Orientierung der Internationalen Raumstation ISS mit Hilfe mehrerer Gyroskope eingestellt.
In diesem Versuch sollen an einem Gyroskop verschiedene Regler kennengelernt und die Kreiseleffekte Präzession und Nutation verdeutlicht werden. Ziel ist es, vorgegebene Positionen des Gyroskops geregelt anfahren zu können. Die verwendeten Regler sind sowohl Eingrößen- als auch Mehrgrößenregler, und sowohl lineare als auch einfache nichtlineare Regler.
Speicherprogrammierbare Steuerung eines Mischprozesses
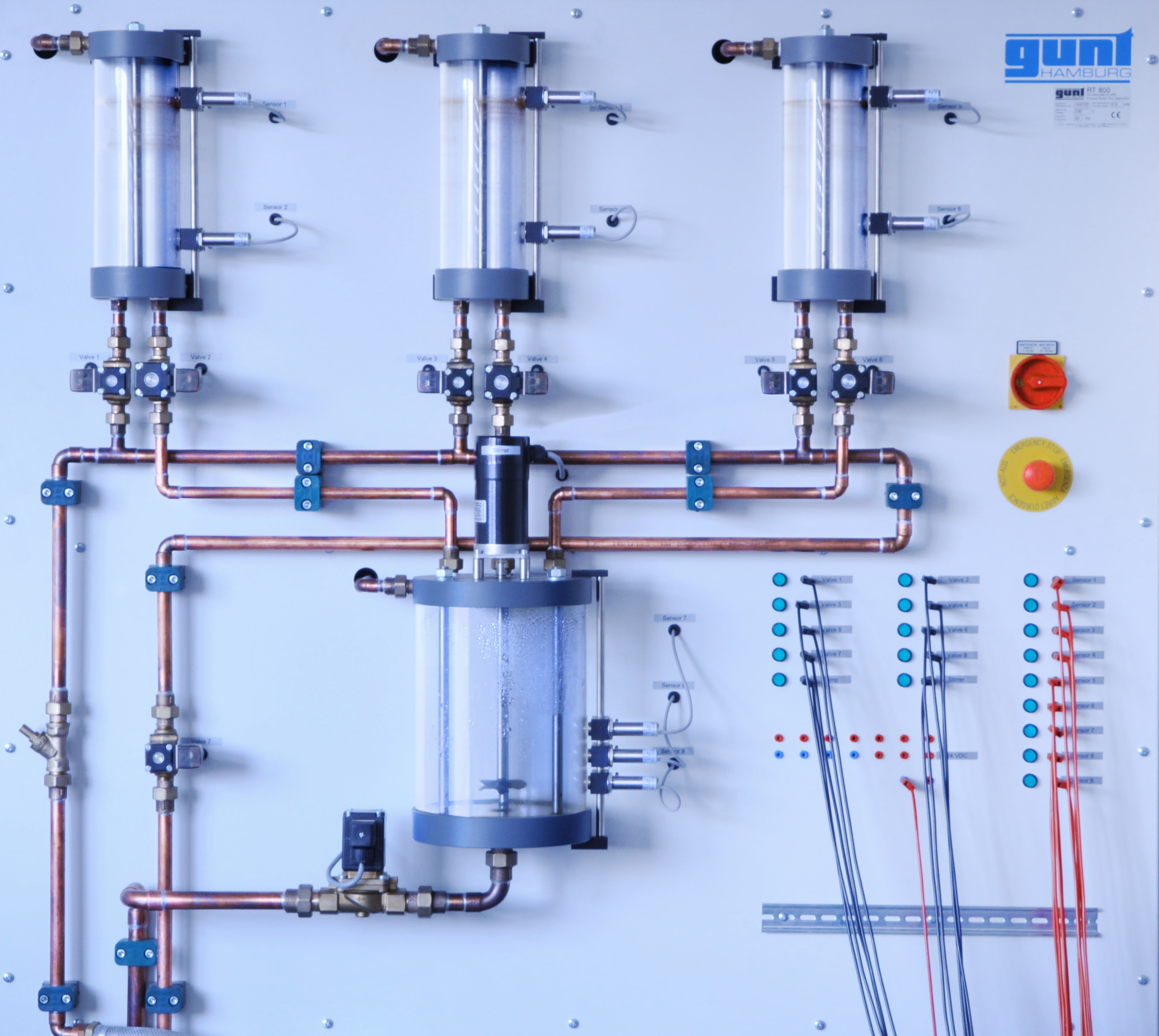
Im Laufe der Jahre hat sich der Umfang und die Komplexität von automatisierungstechnischen Anlagen stetig vergrößert. In Folge dessen sind auch die Anforderungen an die entsprechenden Steuerungssysteme enorm gestiegen. Dies mündete zu Beginn der 90er Jahre in der Formulierung der Norm IEC 1131 (heute: IEC 61131), die dem Wildwuchs der Systeme Einhalt geboten hat, da ihr der größte Teil der Hersteller gefolgt ist. Teil III dieser Norm befasst sich mit Programmiersprachen für Speicherprogrammierbare Steuerungen (SPS) und ermöglicht eine deutlich transparentere Softwareentwicklung.
In diesem Praktikumsversuch wird das in der Norm intendierte strukturierte und effiziente Vorgehen beim Steuerungsentwurf anhand der Steuerung eines Mischprozesses durchgespielt. Es erfolgt der Entwurf einer Rezeptsteuerung, die den gesamten Prozess ähnlich dem Kochen nach Rezept abarbeitet. Zur Verfügung stehen ein Modell einer Mischanlage und die kompakt SPS PS4-141-MM1 der Firma MOELLER, dessen Programmierung über einen PC mit Hilfe der Software Sucosoft S40 erfolgt. Ziel ist es, das Steuerungsprogramm modularisiert vorzubereiten, so dass eine Anpassung an das erst zum jeweiligen Versuchstermin bekannt gegebene, konkrete Rezept bequem möglich ist.
Regelung von Servoantrieben
Regelung von Servoantrieben werden in vielen technischen Ausführungsformen bei der Steuerung von Maschinen aller Art in der Industrie verwendet. Das Gebiet der Servoregler hat sich deshalb im Lauf der Zeit als abgeschlossenes Gebiet mit eigenen Bauformen entwickelt. Es gibt Servoregler mit kleinen Leistungen, z.B. für Instrumenten- und Rechnerzwecke. Sie werden aber auch für große Leistungen gebaut, z.B. als Antennen-Nachführungen oder Kopierfräßmaschinen.
In diesem Versuch sollen in einer Simulation verschiedene Reglertypen zu Ausregelung des Servoantriebs verwendet werden. Im ersten Teil wird ein linearer Regler benutzt. Das Ergebnis soll dann im zweiten Teil mit einem strukturvariablen Regler verglichen werden. In diesem Abschnitt sollen auch ein Verständnis für die Effekte vermittelt werden, die bei strukturvariablen Reglern auftreten können (Instabilitäten, Gleitzustände, Schwingungen). In einem dritten Teil soll der Regelkreis mit verschiedenen Nichtlinearlitäten erweitert und auf Dauerschwingungen untersucht werden.
Regelung einer Verladebrücke
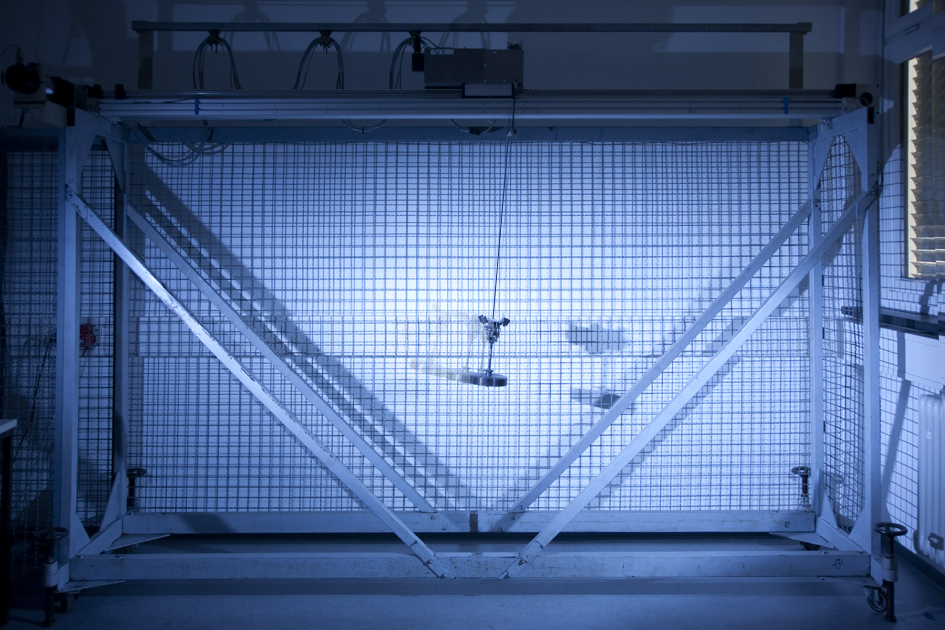
Bei diesem Versuch soll mit Methoden des so genannten „Rapid Control Prototyping“ ein Zustandsregler für das physische Modell einer Verladebrücke entwickelt werden.
Verladebrücken werden dazu eingesetzt, Lasten von einer Startposition A zu einer Zielposition B zu transportieren, z.B. als Containerbrücken zur Be- und Entladung von Schiffen, Eisenbahnwaggons und Lastkraftwagen oder als Laufkrane in Montagehallen.
Solange sich Personen im Gefahrenbereich der Last aufhalten, ist aus Gründen der Arbeitssicherheit das Heben, Senken und Verfahren der Last Aufgabe eines Kranführers, der z.B. von mechanischen Lastpendeldämpfungen unterstützt wird. Bei großen Anlagen ist die Belastung des in der Verladebrücke sitzenden Kranführers so groß, dass er bereits nach einer Stunde ausgewechselt werden muss. Durch den Einsatz einer Regelung kann der Kranführer bei seiner Aufgabe unterstützt und damit bei seiner Arbeit entlastet werden.
In diesem Versuch soll der Entwurf verschiedener Zustandsregelungen mittels der Methoden des so genannten „Rapid Control Prototyping“ unter Verwendung von MATLAB bzw. SIMULINK demonstriert werden. Dabei wird die Regelung auf einem PC mittels einer graphischen Oberfläche entworfen und mit der realen Strecke getestet, statt direkt auf der späteren Zielhardware. Wie gezeigt werden wird, führt dies nicht nur dazu, dass Fehler im Entwicklungsprozess frühzeitiger erkannt werden, sondern auch dazu, dass man im Vergleich zu herkömmlichen Entwicklungsmethoden auch Zeit und damit Geld spart.

