OP-Assistent aus dem Drucker
Studierende entwickeln einen Roboter für die Medizintechnik
06.12.2019 von Mareike Hochschild
In seiner Bachelorarbeit am Fachgebiet Mess- und Sensortechnik hat Felix Herbst einen Roboter entwickelt und per 3D-Druck hergestellt. Kombiniert mit einer Hohlnadel, der Sonja Wismath in ihrer Bachelorarbeit einen Kraftsensor in die Spitze integrierte, entsteht so ein Roboter, der im kooperativen Studiengang Medizintechnik als OP-Assistent eingesetzt und aktuell vom Masterstudenten Dennis Roth weiterentwickelt wird. Ein erfolgreiches Projekt von Studierenden für Studierende.

Roboter halten in immer mehr Bereichen Einzug und finden mit fortschreitender Forschung auch immer mehr Akzeptanz. Am Fachgebiet Mess- und Sensortechnik des Fachbereichs Elektrotechnik und Informationstechnik (etit) ist die Robotik bereits ein fester Bestandteil der Lehre. Gelernt und geforscht wird unter anderem an einem herkömmlichen modernen Industrieroboter, der mit Zubehör an die 100.000 Euro kostet. Für Praktika, Abschlussarbeiten und Seminare würden gleich mehrere Roboter für alle Studierenden benötigt, das heißt, der Bedarf an Robotern für die praktische Lehre ist hoch, die Kosten leider auch.
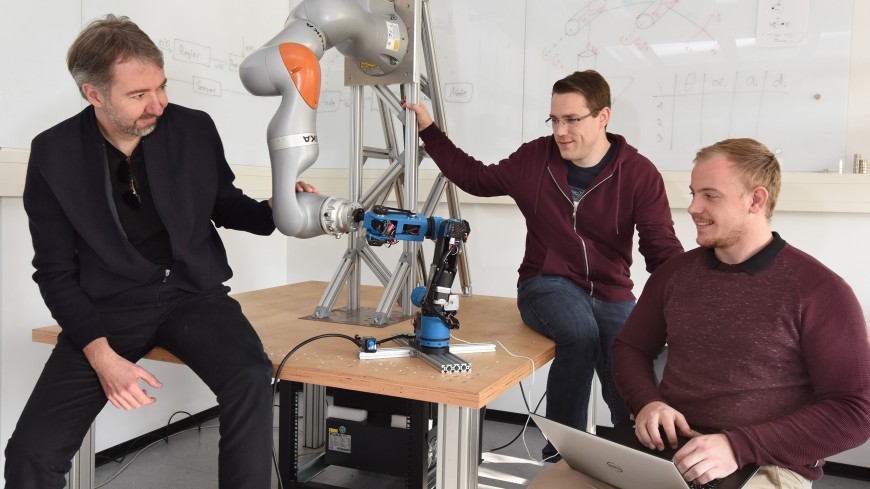
Gut, wenn das Know-how und die Begeisterung zur Entwicklung solcher Roboter in den Reihen der eigenen Studierenden zu finden sind: Felix Herbst hat in seiner Bachelorarbeit einen funktionsfähigen Sechs-Achsen-Knickarmroboter entwickelt und innovativ gefertigt. Dieser größtenteils 3D-gedruckte Roboter ist mit einer Spannweite von 43 Zentimetern deutlich kleiner als der Industrieroboter mit 80 Zentimetern, lässt sich aber genauso programmieren und ist dazu mit moderner Sensorik zur autonomen Lagebestimmung der einzelnen Achsen ausgestattet. Kostenpunkt: nur 600 Euro. „Meine Motivation war es, einen kostengünstigen Roboterarm als Alternative zum vorhandenen Industrieroboter zu konstruieren“, sagt Herbst.
Ein Sechs-Achsen Knickarmroboter…
Das ist ihm gelungen, mehr als das: Sein Roboter ist flexibel und modular anwendbar. Dazu hat er mithilfe von CAD (computer-aided design)-Anwendungen eine technische Zeichnung angefertigt. Per Schmelzschichtverfahren wurde dann eine Ebene auf die andere aufgetragen. Herbsts Roboter ist nicht nur kostengünstiger, sondern auch einfach reproduzierbar und vielseitiger als das Industriemodell. „Während viele Hersteller gerne geschlossene Systeme verwenden, die dann vom Anwender nicht mehr verändert werden können, habe ich bei der Auslegung der Elektronik und Schnittstellen darauf geachtet, dass diese erweiterbar und nicht auf die aktuellen Messwerte und Befehle limitiert sind.“
…ausgestattet mit unabhängiger Motorsteuerungsplatine…
Und so steht der hauseigene Roboter auch in Sachen Elektronik dem Industrieroboter in nichts nach. Ganz im Gegenteil: „Jede der sechs unabhängigen Motorsteuerungsplatinen ist mit einem Mikroprozessor, einem Motortreiber, einem Magnet Encoder zur Nullpunktpositionierung und einem CAN Interface (Controller Area Network) ausgestattet“, erklärt Sven Suppelt, der neben seinem etit-Masterstudium und seiner Mitarbeit an der TU-Ausgründung „core sensing“ die Elektronik des Roboters entwickelt hat. „Man könnte sagen, dass wir die Intelligenz der Motorsteuerung direkt zu den Motoren bringen.“ Die Steuerung des Roboters sei so mit deutlich weniger Kabeln möglich, und die Integrationsdichte steige. In enger Zusammenarbeit mit Felix Herbst sei er schrittweise dabei vorgegangen, die Platine kontinuierlich zu optimieren.
…und kraftsensorintegrierter Nadel…
Dieser Roboter kann nun verschiedene Bewegungen ausführen und für unterschiedliche Anwendungen genutzt werden, zum Beispiel in der Medizin. Versehen mit einer von Sonja Wismath in ihrer Bachelorarbeit am Fachbereich etit entwickelten Hohlnadel mit integriertem Kraftsensor in der Spitze, wird der Roboter zum OP-Assistenten und für automatisierte Nadelinjektionen verwendet. Die Kräfte, die durch die Interaktion der Nadelspitze mit dem umliegenden Gewebe entstehen, lassen sich so messen.
„Diese Kräfte können dem Arzt sowohl während der Behandlung als auch in einem Trainingsszenario verstärkt dargestellt werden. Das sensibilisiert die haptische Wahrnehmung des Arztes“, so Wismath. Das ermögliche einen genaueren Nadeleinstich. Romol Chadda, Doktorand im Fachgebiet Mess- und Sensortechnik und, gemeinsam mit Jan Hinrichs, Betreuer der Bachelorarbeit, hat die Nadel in diesem Oktober auf der IEEE Sensors Konferenz in Kanada vorgestellt: „Die Reaktionen waren sehr positiv. Die Medizintechnik war schon immer ein relevanter Forschungsaspekt, da diese im direkten Zusammenhang mit dem Wohle der Menschheit steht und die Lebensqualität erheblich verbessern kann. Aktuelle Innovationen und Technologien ermöglichen nun einen größeren Fortschritt in diesem Bereich. Viele der Reaktionen haben uns ermutigt weiter zu forschen.“
…wird zum OP-Assistenten.
Aus dem Roboter mit eben dieser Hohlnadel versehen wird so ein OP-Assistent, der für den Praktikumsversuch „Medizintechnik – der Roboter als OP-Assistent“ im kooperativen Studiengang Medizintechnik zur Anwendung kommt. In der Medizinrobotik hat bisher noch der operierende Arzt die Kontrolle über die durchzuführende Tätigkeit und wird vom Roboter lediglich unterstützt.
„Die größte Herausforderung wird sein, Roboter so weit zu optimieren, dass sie kollaborativ mit anderen Menschen zusammenarbeiten“, so Dennis Roth, ebenfalls Masterstudent am Fachbereich etit und Betreuer des Praktikumsversuchs. Grundsätzlich sollen den Studierenden während des Praktikums der Umgang mit Roboter-Betriebssystemen nähergebracht und verschiedene Begriffe aus der Robotik erklärt werden.
Zudem lernen sie, wie Medizinroboter bei einer Nadelbiopsie eingesetzt werden können. „Dabei wird den Studierenden deutlich gemacht, welche Schwierigkeiten auftreten können und dass ein solcher Nadeleinstich nicht ganz so trivial ist, wie es zunächst scheinen mag.“ Das Besondere aber sei, „dass der von Felix entwickelte Roboter ohne große Kosten vielen Studierenden zugänglich gemacht werden kann. Er erlaubt das gefahrlose Testen von eigenen Codes und eigenen Programmabläufen, sodass die Hemmschwelle im Umgang viel niedriger ist“.
Begeisterung für das eigene Fach
Und damit dieses sehr interdisziplinäre Projekt ab dem kommenden Sommersemester auch zur Anwendung kommt, arbeitet Felix Herbst im Rahmen des Projektseminars PEM (Praktische Entwicklungsmethodik) in der Vertiefungsrichtung Sensorik, Aktorik und Elektronik (SAE) an der Vervielfältigung des Roboters. „Außerdem experimentiere ich aktuell mit neuen Antriebskonzepten, die den Roboter noch präziser und günstiger machen sollen. Parallel arbeite ich an der Erweiterung der Software-Funktionalität. Ich möchte noch weitere Sensoren und Motor-Controller einbinden, die dann neue Nutzungsmöglichkeiten bieten.“
Nach ihrer Motivation befragt, gaben alle ähnliche Antworten, nämlich die Begeisterung für ihren jeweiligen Schwerpunkt. Felix Herbst: „Robotik verbindet für mich Software und Hardware sinnvoll miteinander. Ich programmiere gerne und sehe direkt ein physisches Ergebnis, wenn das Programm funktioniert. Mich faszinieren einfach Automatisierung und Mensch-Maschine Interaktion.“
Professor Mario Kupnik, Leiter des Fachgebiets Mess- und Sensortechnik, hat die einzelnen Projekte begleitet, koordiniert und zusammengeführt. Ihn fasziniert die herausragende Zusammenarbeit seiner Studierenden: „Unsere Studierenden haben aus dem Stand heraus einen sehr beeindruckenden Roboter entwickelt, der nun der kommenden Generation der Medizintechnik-Studentinnen und -Studenten, aber auch Studierenden der Elektrotechnik, Mechatronik und Informatik, zur Verfügung steht und deren praktische Ausbildung deutlich verbessert. Das spricht für die Qualität unserer forschungsgeleiteten Lehre und für das hohe Niveau, auf dem unsere Studierenden lernen und bereits forschen. Einer der Hauptgründe, warum ich Anfang 2015 an die TU Darmstadt gewechselt bin.“


Hintergrund
Der Studiengang B.Sc. Medizintechnik wird vom Fachbereich Elektrotechnik und Informationstechnik der TU Darmstadt in Kooperation mit dem Fachbereich Medizin der Goethe-Universität Frankfurt (GU) gemeinsam getragen. Module werden also sowohl an der TU als auch an der GU gelehrt. Unterstützt durch den RMU-Initiativfonds Lehre sollen in Zusammenarbeit des Fachgebiets Mess- und Sensortechnik der TU und des Instituts für Diagnostische und Interventionelle Radiologie (Professor Thomas Vogl) der GU Praktikumsversuche aus dem Bereich Medizinrobotik aufgebaut werden. Der OP-Roboter findet hierbei Anwendung.